FeiYu Tech FY-Panda2 Autopilot User Manual
Page 48
Guilin Feiyu Electronic Technology Co., Ltd.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com [email protected]
Page 47
sticks to control the aircraft servos surface to see the movement is right or not.
( 6 ) To check the servo control surface automatic movement and setting install
direction, also the airspeed and altimeter. First, you should switch"SW2" to "NULL"
mode, then switch "SW1" to the " Stabilized Mode ".
Taking the Aircraft roll tilt and pitch tilt, and checking whether the GCS attitude table
shows the attitude is correct or not if not, you need to re-set the" Inst Setting " .
Airspeed indicator and altimeter display value should be 0 or near 0 .Taking the
Aircraft roll tilt, pitch, tilt, and head deflection, and check whether the servo control
surface automatic movement is correct or not, the inspection method, please refer to the
description of" Servo Control Reverse setting".
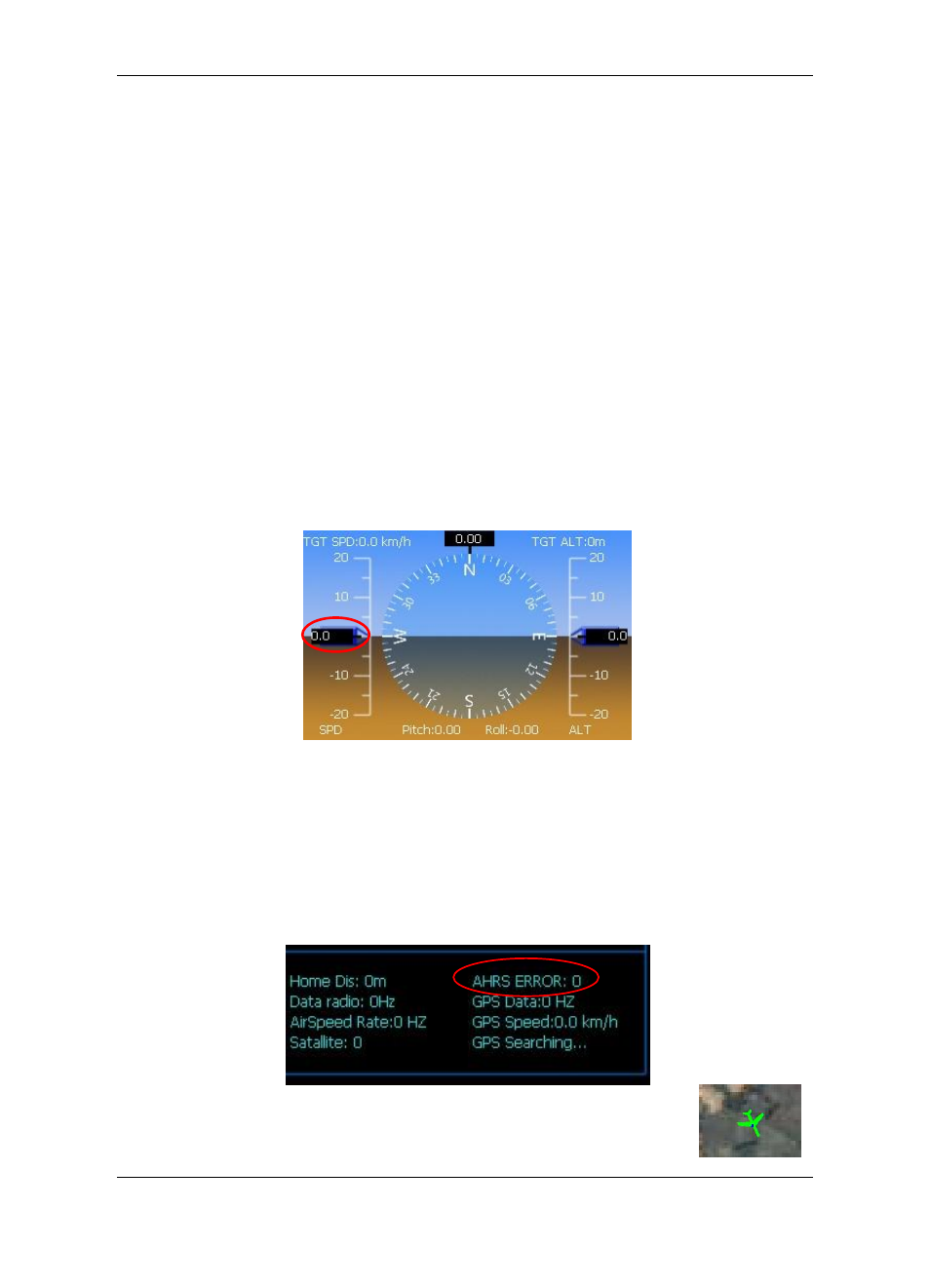
Attention: If you normal connect the airspeed sensor to Panda
Ⅱ,the speed
table(picture below ) will display the airspeed. And if you do not use the airspeed
sensor(Only connect the GPS to pabda2),then will display GPS speed.
( 7 ) Data checking and vibration testing:
First check every flight control data is right or not.
Pushing the throttle ,and check whether the value of the " AHRS ERROR " is
increase at each throttle part. The normal situation is at the value of 0, if the values
continue to increase, it shows that you need to do more damping installation for PandaⅡ
module. If you do not do well job for damping installation, the aircraft can not take off.
( 8 ) Putting the aircraft into the field, and waiting for GPS
positioning success. The GPS red LED will continuous flash after GPS