User guide, 2 configuring rth/safety mode – Eagle Tree Vector User Manual
Page 52
USER GUIDE
52
5.12.2
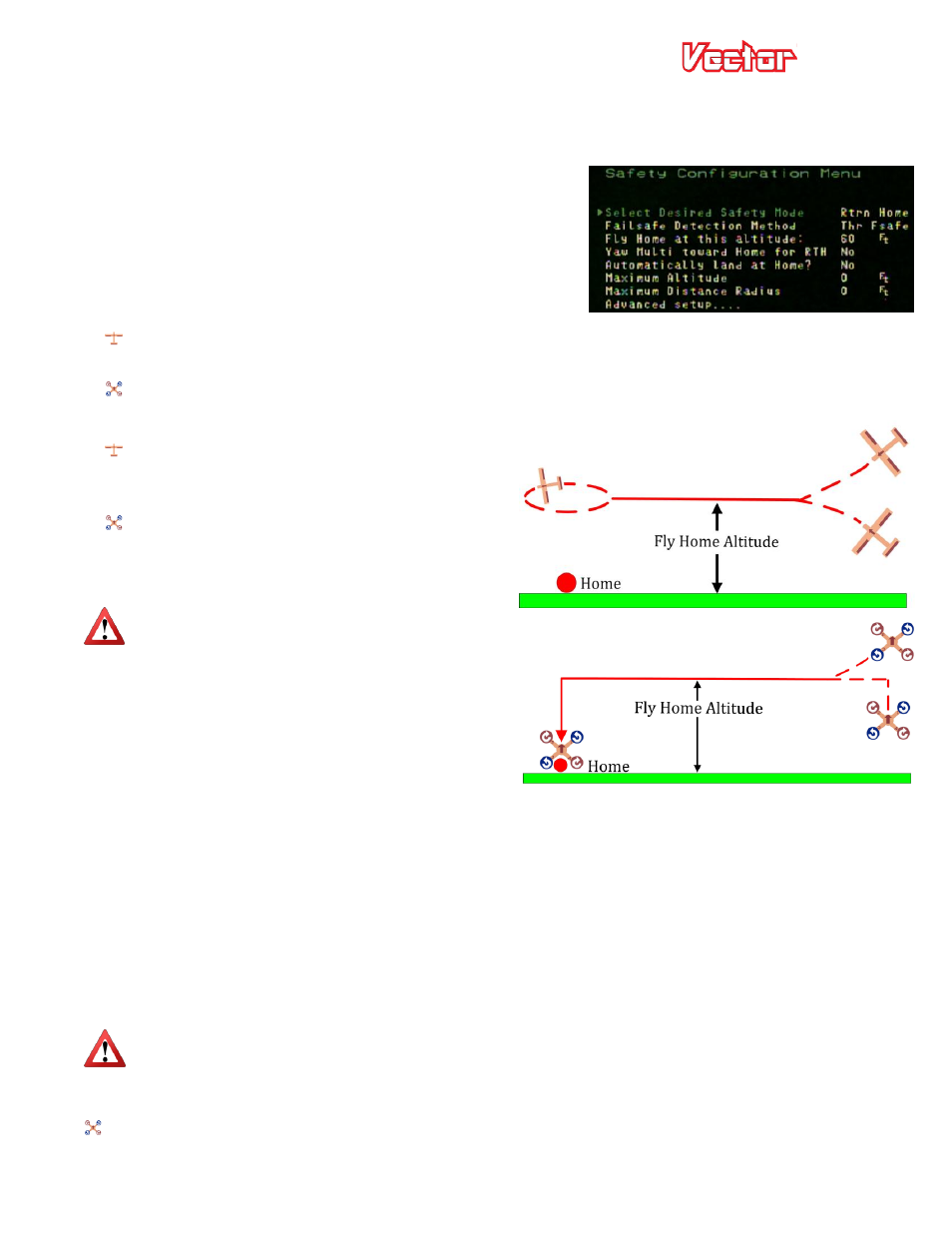
Configuring RTH/Safety Mode
5.12.2.1
Selecting the Desired Safety Mode
The Vector has a few options for what to do when failsafe is
detected, referred to as “Safety Modes.” To select the desired
failsafe option, invoke the “Safety Configuration Menu” and change
the “Select the Desired Safety Mode” item.
These options are available:
Land:
For fixed wing, the Vector will try to keep the wings level and shut the throttle off after failsafe is
detected, resulting in a “crash landing” (not a good idea for stall-prone airframes!)
For multirotors, the multi will descend immediately after failsafe is detected, at a controlled rate.
Return Home:
For fixed wing, the Vector attempts to bring the
model to the home point, and begins circling above
home once there.
For multirotors, the multirotor returns home, and
will either hover above the home point at the
specified altitude, or land, depending on the
“Automatically Land at Home” setting.
For fixed wing models, always assume that the
propeller may spin when RTH is triggered, even
on the ground!
The Vector attempts to detect when the model is on the
ground, and disables the propeller during RTH if so, but
in some conditions, such as with bad GPS readings,
altimeter drift, or incorrect settings, the Vector may not
be able to detect that the model is on the ground, and the
propeller could spin!
Always have your radio turned on before your model is powered, and disconnect your model’s battery before
turning off your transmitter. Never engage “RTH Test” via the mode/submode switches unless you are
prepared for the propeller to spin!
5.12.2.2
Additional Options for RTH
There are several options that can be configured for RTH:
Fly home altitude: the altitude to ascend or descend to when returning to home, and to maintain once the
model has returned. This is chosen with the “Fly home at this altitude:” setting.
If the altimeter drifts due to changes in barometric pressure or other causes, the fly home altitude will
be higher or lower than the actual altitude by the amount of the drift. A very large decrease in
barometric pressure, such as can occur if a storm is moving in, might result in the model descending into the
ground when RTH is triggered, if your Fly Home Altitude is set too low!
Yawing toward home: If you would like the multirotor to turn (yaw) towards home before returning
to home, set the “Yaw multi toward home for RTH” to “Yes”.