User guide, 11 configuring the flight controller/stabilizer, 1 setting controller gains – Eagle Tree Vector User Manual
Page 42
USER GUIDE
42
The following chart lists the modes that can be programmed for each of the 2 or 3 Submode switch positions
(see section 5.9.1 for a description of these flight modes):
Submode Switch Setting
Description
Not Used
This Mode switch position is not used (unprogrammed)
No Hold
Selects 2D Flight Mode with no Heading or Altitude Hold
Hold
Selects 2D Flight Mode with Altitude Hold, and additionally Heading hold for
Fixed Wing
Loiter
Selects Loiter Flight Mode (GPS)
Cartesian
Selects Cartesian Flight Mode
Cart Loit
Selects Cartesian Flight Mode with Loiter (GPS)
Polar
Selects Polar Flight Mode (GPS)
Polr Loit
Selects Polar Flight Mode with Loiter (GPS)
Center Stick
Selects Center Stick Stabilization Flight Mode
RTH Test
Engages RTH test mode. (GPS)
5.11 Configuring the Flight Controller/Stabilizer
The main steps involved in configuring and tuning the flight controller are:
Setting the controller gains for initial flight
Confirming that the control surfaces are moving in the correct direction
Confirming ESC endpoints are correctly programmed
Setting idle throttle, and confirming motor order and rotation direction are correct
Configuring low battery autoland
Setting flat level mounting, which lets the Vector compensate for small mounting offsets
Rezeroing the gyros
5.11.1
Setting Controller Gains
5.11.1.1
Description of Controller Gains
If you are not familiar with some of the terms used below,
please refer to the glossary at the start of the manual, or consider
searching for the terms on
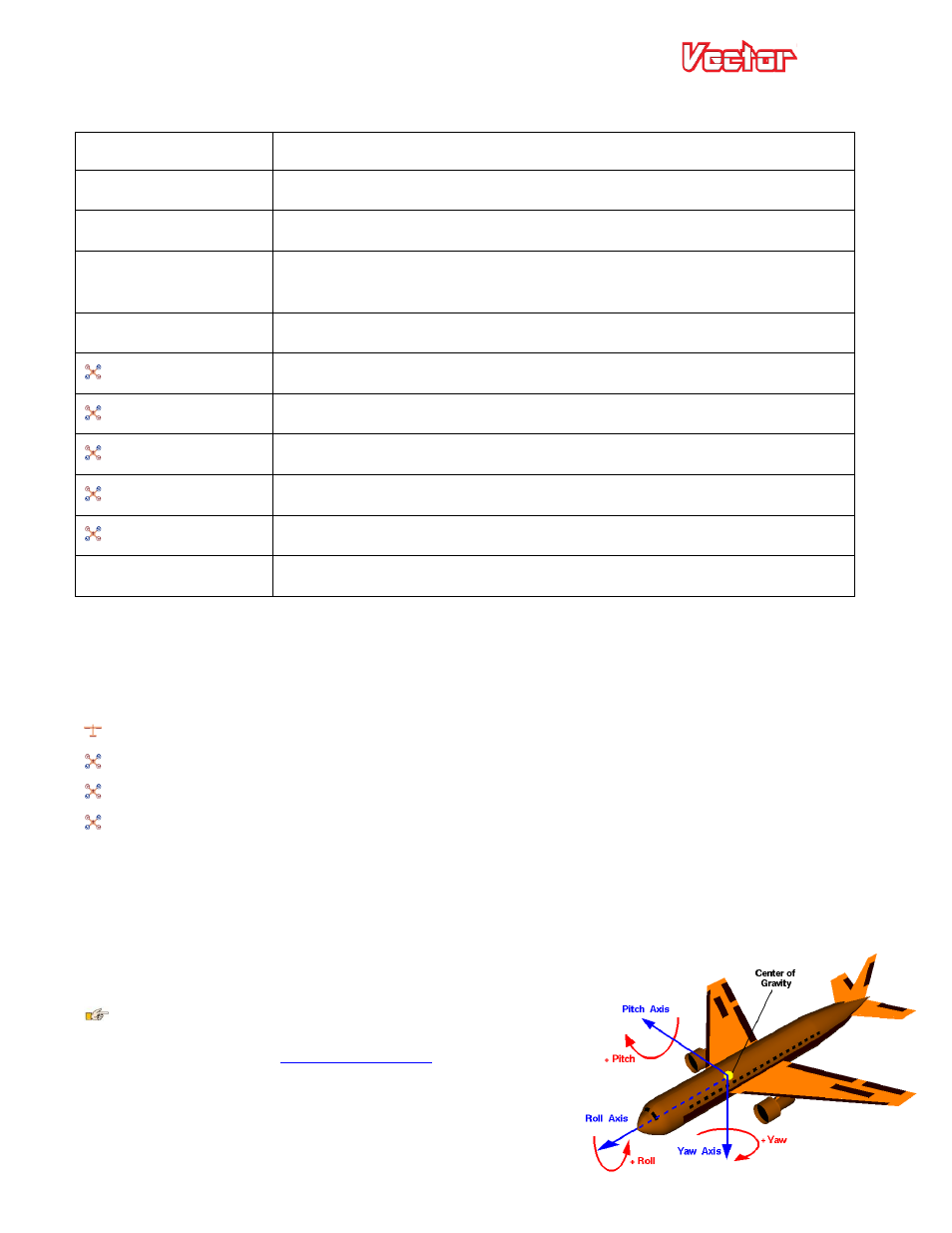
The concept of controller stabilization gains can be hard to
understand, and many people (including many very experienced
pilots) have trouble grasping these concepts – you are not alone!
Fortunately, with the Vector, only a basic knowledge of how