Jeppesen Marine Workboat Navigator 1.3 User Manual
Page 152
144
Jeppesen Workboat Navigator User’s Guide
Jeppesen Workboat Navigator User’s Guide
144
Jeppesen Workboat Navigator User’s Guide
144
Jeppesen Workboat Navigator User’s Guide
Jeppesen Workboat Navigator User’s Guide
144
Jeppesen Workboat Navigator User’s Guide
144
Jeppesen Workboat Navigator User’s Guide
144
15
-
Autopilot
Jeppesen Workboat Navigator User’s Guide
144
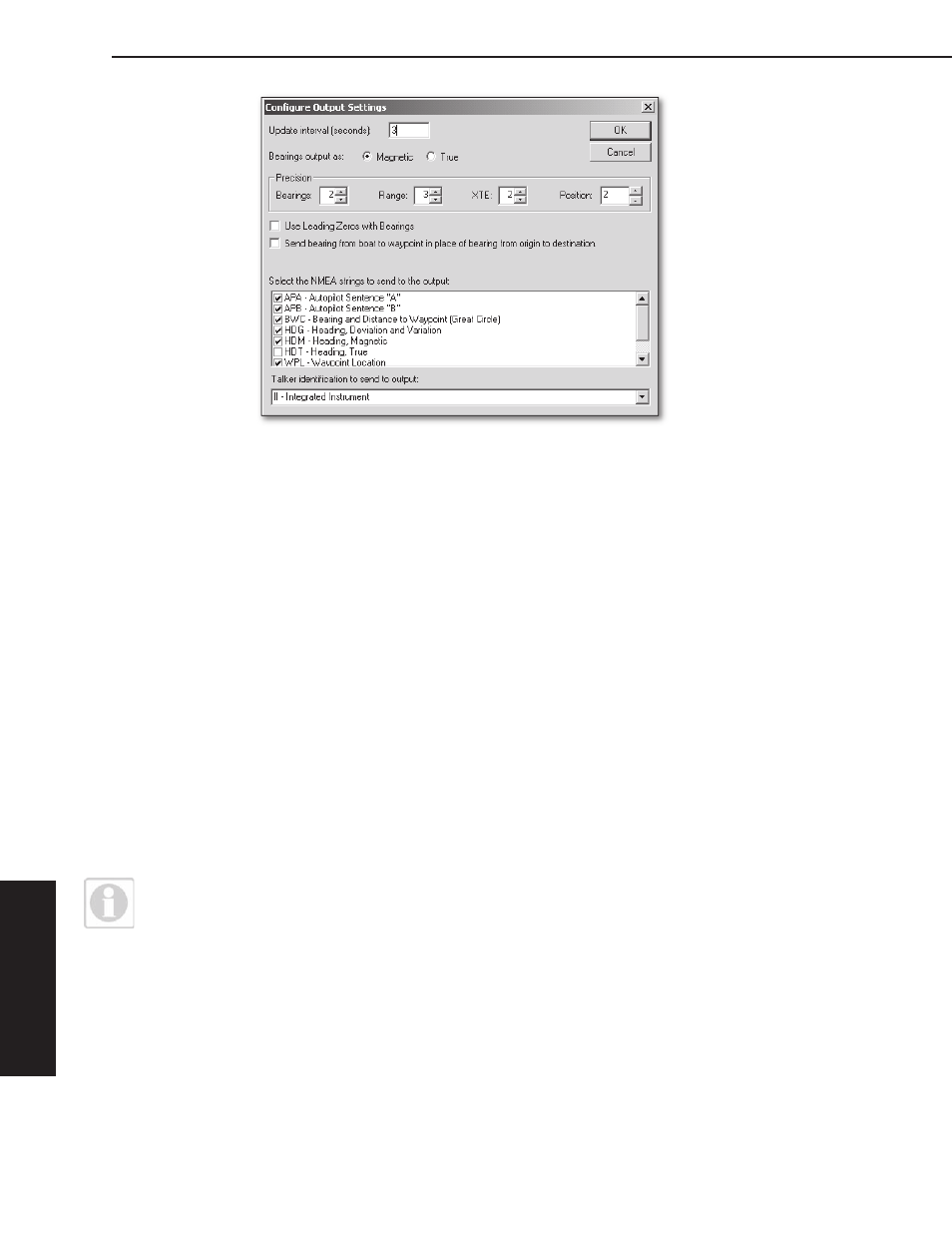
Figure 15.2 - Configure Autopilot Settings Dialog Box
Definitions Of Autopilot Setting Options
Update Interval. The default setting is three seconds.
Bearing Output. The default value is Magnetic.
Precision. A precision level of 1 means xx.x, a precision level of 2 means xx.xx,
etc. NMEA protocol does not specify precision.
Use Leading Zeros with Bearings. This feature adds a zero to the front of
heading and it is unchecked by default.
Send Bearing from boat to waypoint in place of bearing from origin to
destination. This feature is unchecked
by default.
Sentence Selection. Select the NMEA sentences to send to the output. The
following are selected by default. For a more detailed explanation of NMEA
sentences, please refer to the NMEA Specifications document.
APB - Autopilot Sentence “B”
BWC - Bearing and Distance to Waypoint (Great Circle)
RMC - Recommended Minimum Specific GPS/Transit Data
VTG - Track Made Good and Ground Speed
WPL - Waypoint Location
XTE - Cross Track Error
Talker Identification to send to output. This feature uses EC as the default.
NOTE:
The changes you make in the Configure Output Settings window
only become active after you click the OK or Apply buttons in the Options
window.
•
•
•
•
•
•
•
•
•
•
•
•
•