Main control board i/o and encoder settings, Main control board i/o and encoder settings -31 – Rockwell Automation LPM20 Liquid-Cooled AC Drive with High Performance Drive Control User Manual
Page 43
Installation/Wiring
1-31
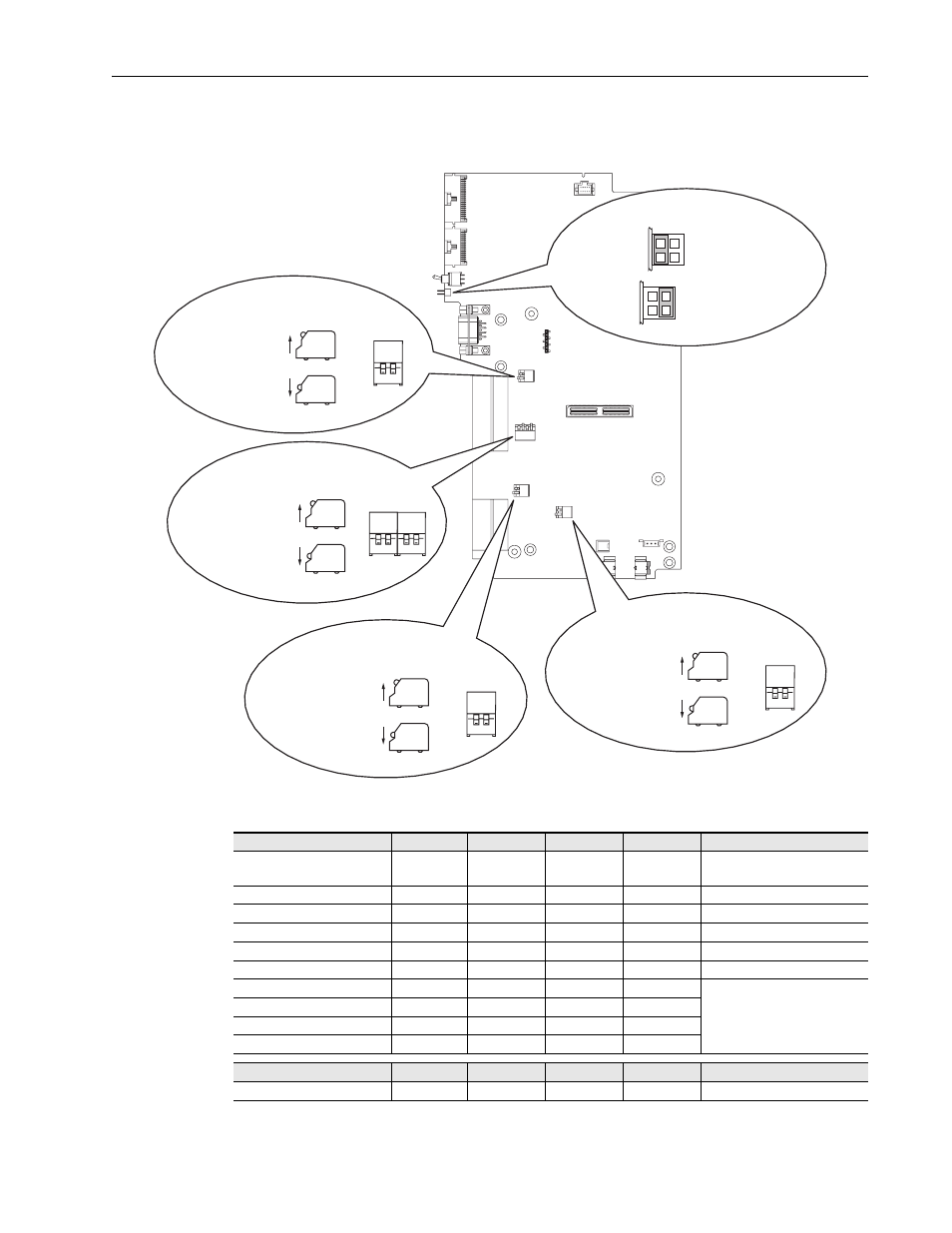
Main Control Board I/O and
Encoder Settings
Table 1.K Switch Settings
Please note there are two separate values for an encoder.
S1
1 2
FRONT
TOP VIEW
SIDE VIEW
Up = Open = Off
Down = Closed = On
SWITCH S5
FRONT
TOP VIEW
SIDE VIEW
Up = Open = Off
Down = Closed = On
SWITCH S2
1 2
3 4
1 2
FRONT
TOP VIEW
SIDE VIEW
Up = Open = Off
Down = Closed = On
SWITCH S3
1 2
FRONT
TOP VIEW
SIDE VIEW
Up = Open = Off
Down = Closed = On
SWITCH S4
= HW Enable
= No HW Enable
JUMPER P22
1
2
3
4
1
2
3
4
Function
Switch
Open
Closed
Default
Notes
Configuring Digital Input 6 for
Hardware Enable (HW Enbl)
P22
Jumper
pin 2-4
HW enable
pin 1-3
No enable
pin 2-4
HW enable
No jumper = HW enable
Analog Input 1
S5-1
Voltage
Current
Voltage
Change with Power Off.
Analog Input 2
S5-2
Voltage
Current
Voltage
Change with Power Off.
Digital Inputs 4-6 Voltage
S4-1, S4-2
115V ac
24V dc
24V dc
Change with Power Off.
Digital Input 1 Voltage
S3-1
24V dc
12V dc
24V dc
Change with Power Off.
Digital Input 2 Voltage
S3-2
24V dc
12V dc
24V dc
Change with Power Off.
Encoder Voltage Supply
S2-1
12V dc
5V dc
24V dc
Change with Power Off.
Set all switches the same.
Encoder Signal A Voltage
S2-2
12V dc
5V dc
12V dc
Encoder Signal B Voltage
S2-3
12V dc
5V dc
12V dc
Encoder Signal Z Voltage
S2-4
12V dc
5V dc
12V dc
Function
Switch
Open
Closed
Default
Notes
DriveLogix Processor
S1
RUN
Remote
Program
Processor mode.