Setting a fault action, Setting a fault action -10 – Rockwell Automation 22-COMM-D DeviceNet Adapter User Manual
Page 34
3-10
Configuring the Adapter
By default, when communications are disrupted (for example, a cable is
disconnected) or the scanner is idle, the drive responds by faulting if it is
using I/O from the network. You can configure a different response to
communication disruptions using Parameter 07 - [Comm Flt Action]
and a different response to an idle scanner using Parameter 08 - [Idle
Flt Action].
To change the fault action
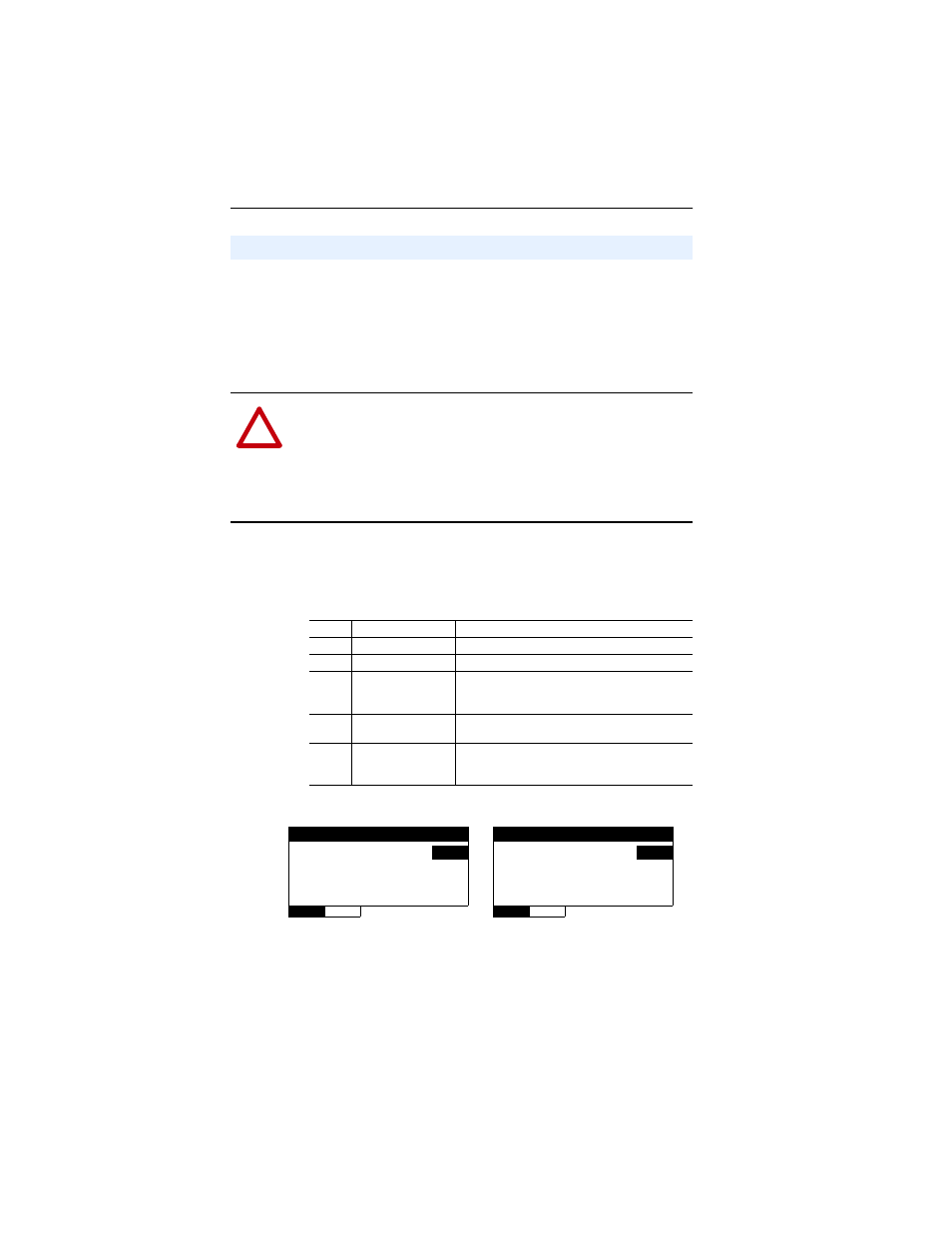
• Set the values of Parameters 07 - [Comm Flt Action] and 08 - [Idle
Flt Action] to the desired responses:
Figure 3.10 Fault Action Screens on PowerFlex 4-Class HIM (22-HIM-*)
Changes to these parameters take effect immediately. A reset is not
required.
If Multi-Drive mode is used, the same fault action is used by the adapter
for all of the drives it controls (Drive 0 - Drive 4).
Setting a Fault Action
!
ATTENTION: Risk of injury or equipment damage exists. Parameters
07 - [Comm Flt Action] and 08 - [Idle Flt Action] let you determine the
action of the adapter and connected drive if communications are
disrupted or the scanner is idle. By default, these parameters fault the
drive. You can set these parameters so that the drive continues to run.
Precautions should be taken to ensure that the settings of these
parameters do not create a hazard of injury or equipment damage.
Value
Action
Description
0
Fault (default)
The drive is faulted and stopped. (Default)
1
Stop
The drive is stopped, but not faulted.
2
Zero Data
The drive is sent 0 for output data after a
communications disruption. This does not
command a stop.
3
Hold Last
The drive continues in its present state after a
communications disruption.
4
Send Fault Cfg
The drive is sent the data that you set in the fault
configuration parameters (Parameters 10 - [Flt
Config Logic] and 11 - [Flt Config Ref]).
Comm Flt Action
Parameter:
#
007
Fault
0
VALUE
LIMITS
SEL
!
Idle Flt Action
Parameter:
#
008
Fault
0
VALUE
LIMITS
SEL
!