Step 8 programming the input setup, Step 7 programming the pid settings – Red Lion DLC User Manual
Page 8
8
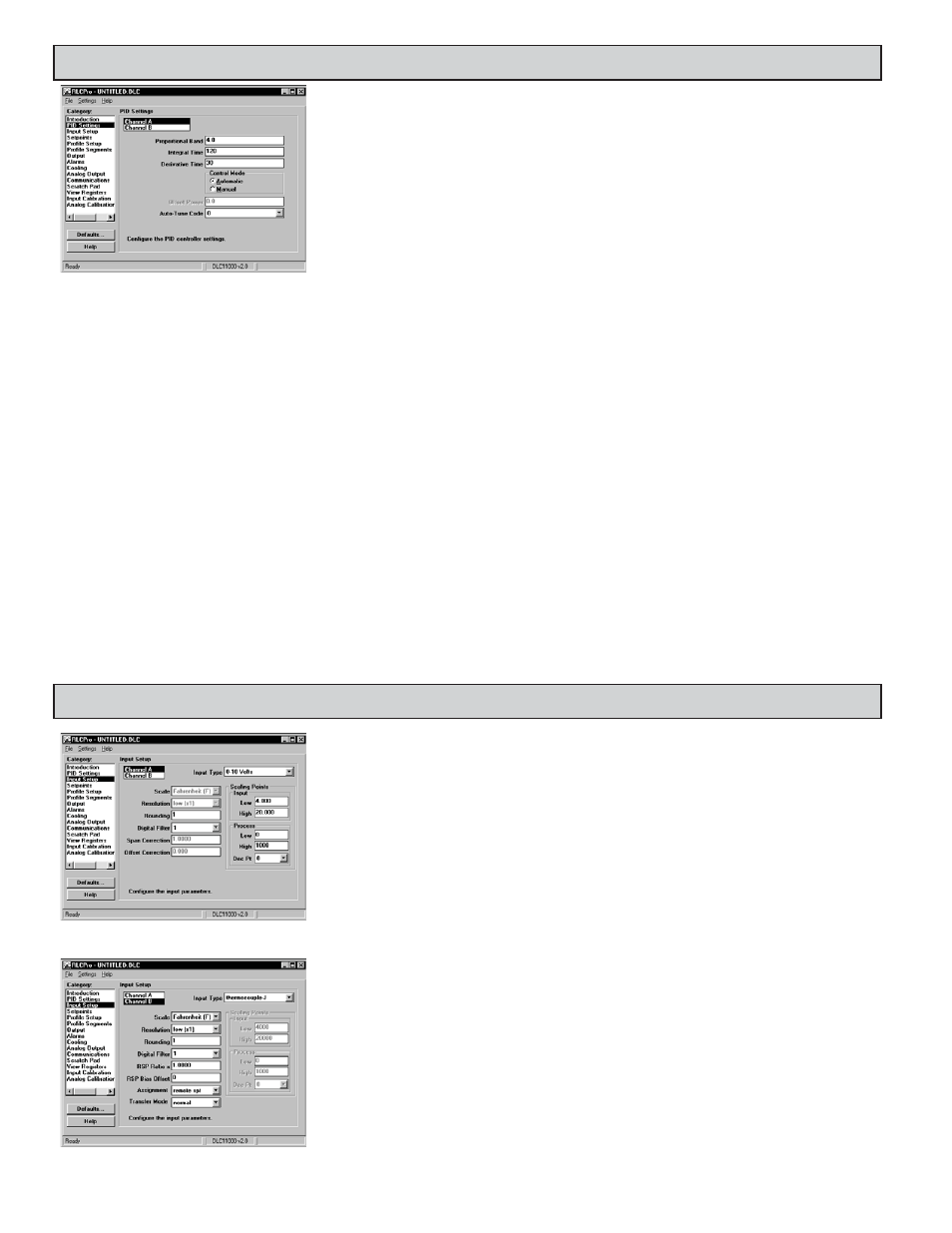
STEP 8 PROGRAMMING THE INPUT SETUP
Input Type (40101/40201): Select the proper input type from the pull down menu. Make sure the input
jumpers are set to match the input signal selection.
Scale (40102/40202): Select either degrees Fahrenheit or Celsius. For mV, resistance, voltage or current types,
this has no effect. If changed, check all temperature related values, as the DLC does not automatically
convert these values.
Resolution (40103/40203): For all temperature and ohms Input Types low (x1) resolution selects whole units
of measure. In these same modes, high (x10) resolution selects tenth of units of measure. For mV mode, low
selects tenths of mV and high selects hundredths of mV. If changed, be sure to check all parameters because
the controller does not automatically convert related parameter values. For voltage or current types, this has
no effect.
Rounding (40104/40204): Rounding selections other than 1 cause the process value to round to the nearest
rounding increment selected. (For example, rounding of 5 causes 122 to round to 120 and 123 to round to
125.) Rounding starts at the least significant digit of the process value. If the signal is inherently jittery, the
process value may be rounded to a value higher than 1. If the range of the signal exceeds the required
resolution (for example, 0-1000 psi, but only 10 psi resolution is required), a rounding increment of 10 will
effectively make the reading more stable.
Digital Filtering (40105/40205): The filter is an adaptive digital filter that discriminates between measurement
noise and actual process changes. If the signal is varying too greatly due to measurement noise, increase the
filter value. If the fastest controller response is needed, decrease the filter value.
Span Correction (40106/40206): This value is the correction slope. A span of 1.0000 applies no correction.
Span only applies to temperature sensor, millivolt, and ohms inputs.
Offset Correction (40107/40207): This value offsets the temperature value by the entered amount. Offset only
applies to temperature sensor, millivolt, and ohms inputs
Channel B Assignment (40198): This is used to configure Channel B to operate as a Remote Setpoint to
Channel A. Channel B PID control is not functional when the input is assigned as a Remote Setpoint.
STEP 7 PROGRAMMING THE PID SETTINGS
Note: The register numbers correspond to (Channel A/Channel B).Channel B PID control is not functional
when the input is assigned as a Remote Setpoint.
The Auto-Tune procedure of the controller sets the Proportional Band, Integral Time, Derivative Time,
Digital Filter, Control Ouput Dampening Time, and Relative Gain (Heat/Cool) values appropriate to the
characteristics of the process.
Proportional Band (40007/40023): Proportional band, entered as percent of full input range, is the band from
the setpoint where the controller adjusts the percent output power based on how close the process value is
to the setpoint. For temperature inputs, the input range is fixed per the entered thermocouple or RTD type.
For process inputs, the input range is the difference between the entered Process Low Scaling Value and the
Process High Scaling Value. The proportional band should be set to obtain the best response to a process
disturbance while minimizing overshoot. A proportional band of 0.0% forces the controller into On/Off
Control with its characteristic cycling at setpoint.
Integral Time (40008/40024): Integral time is defined as the time, in seconds, it takes the output power due to integral action alone to equal
the output power due to proportional action alone during a constant process error. As long as the error exists, integral action repeats the
proportional action each integral time. Integral action shifts the center point position of the proportional band to eliminate error in the
steady state. The higher the integral time, the slower the response. The optimal integral time is best determined during PID Tuning. If time
is set to zero, the previous Integral output power value is maintained. Offset Power can be used to provide Manual Reset. Integral Action
can be disabled by writing a ‘1’ to the Disable Intergral Action register (40044/40052).
Derivative Time (40009/40025): Derivative time, entered as seconds per repeat, is the time that the controller looks ahead at the ramping
error to see what the proportional contribution will be and it matches that value every Derivative time. As long as the ramping error exists,
the Derivative action is repeated by Proportional action every derivative time. Increasing the derivative time helps to stabilize the response,
but too high of a derivative time, coupled with noisy signal processes, may cause the output to fluctuate too greatly, yielding poor control.
Setting the time to zero disables Derivative Action.
Control Mode (40041/40049): In Automatic Mode, the percentage of Output Power is automatically determined by PID or On/Off Control.
In Manual Mode, the percentage of Output Power is entered manually. For more information, see Control Mode Explanations Section.
Output Power (40005/40021): This parameter can only be changed by direct entry in Manual Mode. For more details on this parameter, see
the Control Mode Explanations Section.
Offset Power (Manual Reset) (40010/40026): If the Integral Time is set to zero (Automatic Reset is off), it may be necessary to modify the
output power to eliminate errors in the steady state. The offset power is used to shift the proportional band to compensate for errors in the
steady state. If Integral Action is later invoked, the controller will re-calculate the internal integral value to provide “bumpless” transfer.
Auto-Tune Code (40013/40029): Prior to starting Auto-Tune, this code should be set to achieve the necessary dampening level under PID
Control. When set to zero, it yields the fastest process response with possible overshoot. A setting of 2 yields the slowest response with
the least amount of overshoot. If the Auto-Tune Code is changed, Auto-Tune needs to be reinitiated for the changes to affect the PID
settings. Auto-tune is initiated by writing a ‘1’ to the Auto-Tune start register (40011/40027). The Auto-Tune phase will be shown in
register (40012/40028). For more information, see PID Tuning Explanations Section.