2 performing a user calibration, 3 calibration score, Kusercalscore (frame id 18 d) – PNI FieldForce Trax User Manual
Page 57: Magcalscore, Performing a user calibration, Calibration score, On 7.6.2, Kusercalscore
PNI Sensor Corporation
DOC#1016505 r06
TRAX User Manual
Page 53
7.6.2
Performing a User calibration
The steps below provide an example of the steps to perform a user calibration.
Using the kSetParam command, set the number of tap filters to 0.
Using the kSetConfig command, set kUserCalAutoSampling. “False” is generally
recommended, but “True” may be more convenient.
Using the kSetConfig command, set kMagCoeffSet (magnetometer calibration)
and/or kAccelCoeffSet (accelerometer calibration). These fields allow the user to
save multiple sets of calibration coefficients. “0” is the default.
Using the kSetConfig command again, set kUserCalNumPoints to the appropriate
number of calibration points.
Initiate a calibration using the kStartCal command. Note that this command
requires indentifying the type of calibration procedure (i.e. Full-Range, 2D, etc.).
Follow the appropriate calibration procedure, as discussed in Section 5. If
kUserCalAutoSampling was set to “False”, then send a kTakeUserCalSample
command when ready to take a calibration point. If kUserCalAutoSampling was
set to “True”, then look for kUserCalSampCount to confirm when a calibration
point has been taken. During the calibration process, heading, pitch, and roll
information will be output from the TRAX, and this can be monitored using
kDataResp.
When the final calibration point is taken, the device will present the calibration
score using kUserCalScore.
If the calibration is acceptable (see Section 7.6.2), save the calibration coefficients
using kSave.
7.6.3
Calibration Score
kUserCalScore (frame ID 18
d
)
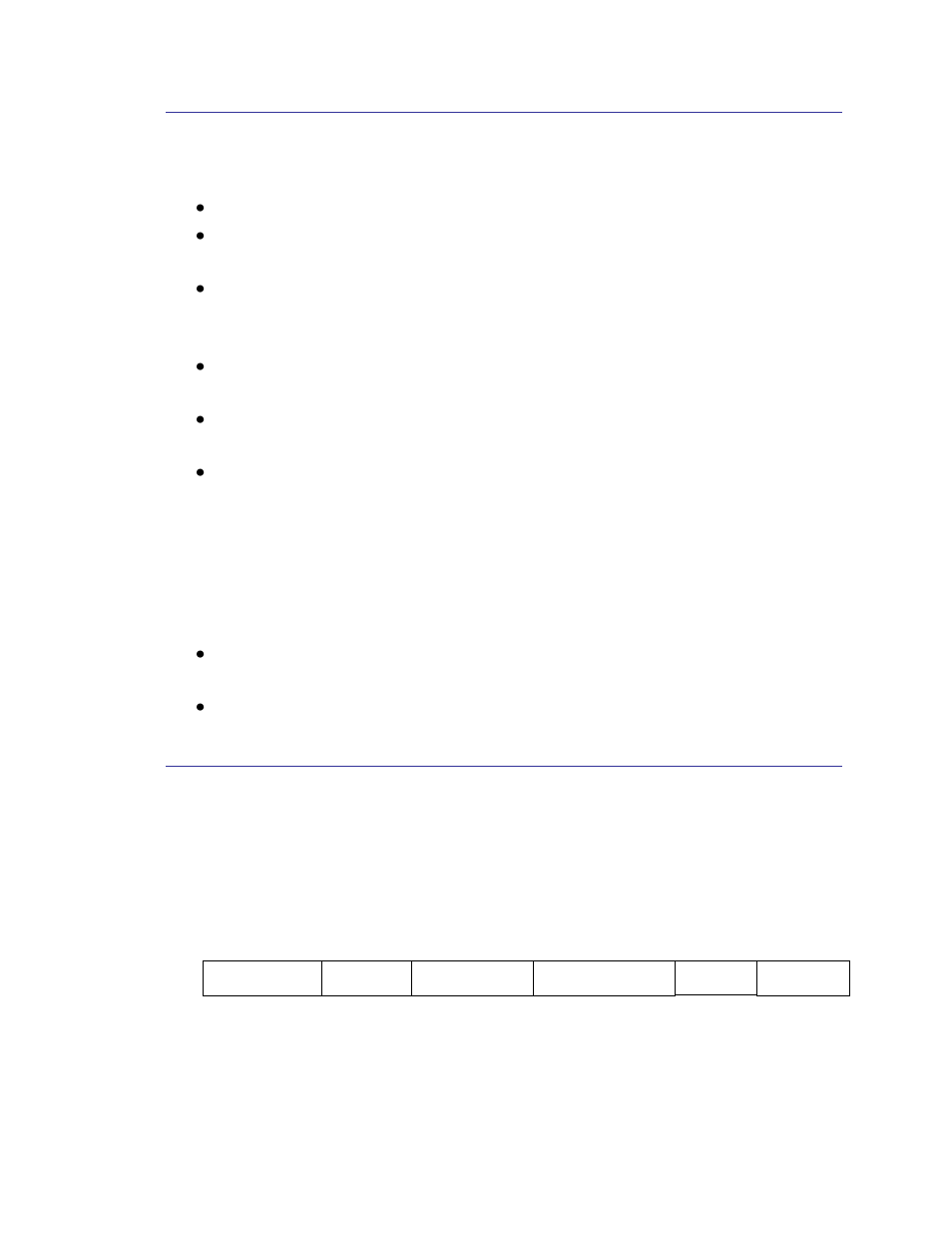
The calibration score is automatically sent upon taking the final calibration point.
The payload is defined below, and the various payload components are discussed
after this.
MagCalScore:
Represents the over-riding indicator of the quality of the magnetometer
calibration. Acceptable scores will be ≤1 for full range calibration, ≤2 for other
Payload
MagCalScore
Float32
Bytes 5-8
Float32
AccelCalScore
Float32
Float32
Float32
Float32
DistributionError
TiltError
TiltRange