Kheadingstatus (component ids 79d), Quaternion (component id 77d), Ktemperature (component id 7d) – PNI FieldForce Trax User Manual
Page 53: Kdistortion (component id 8d), Kcalstatus (component id 9d)
PNI Sensor Corporation
DOC#1016505 r06
TRAX User Manual
Page 49
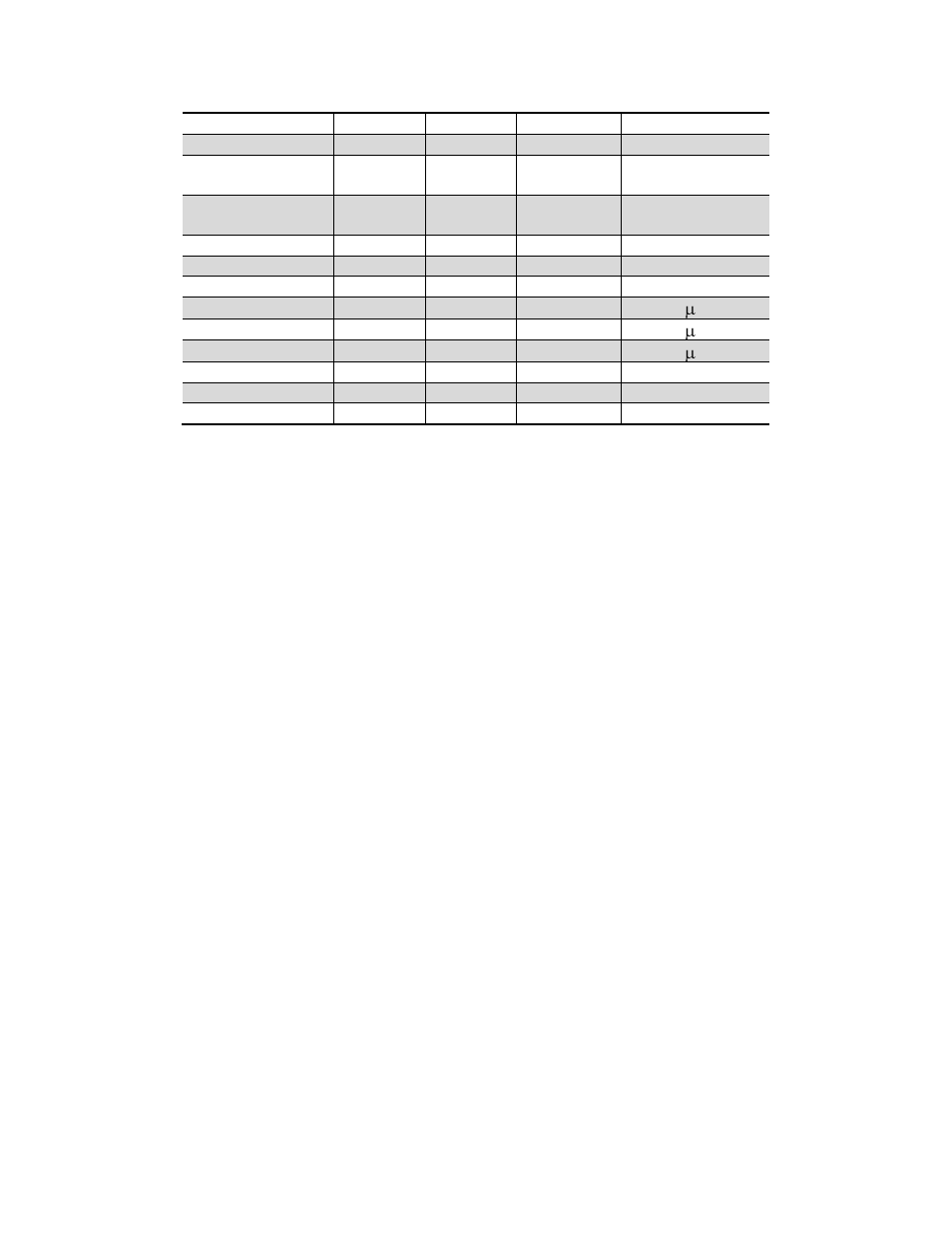
kQuaternion
77
0x4D
4x Float32
quaternion
kTemperature
7
0x07
Float32
˚ Celsius
kDistortion
8
0x08
Boolean
True or False
(Default)
kCalStatus
9
0x09
Boolean
True or False
(Default)
kAccelX
21
0x15
Float32
G
kAccelY
22
0x16
Float32
G
kAccelZ
23
0x17
Float32
G
kMagX
27
0x1B
Float32
T
kMagY
28
0x1C
Float32
T
kMagZ
29
0x1D
Float32
T
kGyroX
74
0x4A
Float32
radians/sec
kGyroY
75
0x4B
Float32
radians/sec
kGyroZ
76
0x4C
Float32
radians/sec
Component types are listed below. All are read-only values.
kHeading, kPitch, kRoll
(Component IDs 5
d
, 24
d
, 25
d
)
Provides compass heading, pitch and roll outputs. The heading range is 0.0˚ to
+359.9˚, the pitch range is -90.0˚ to +90.0˚, and the roll range is to -180.0˚ to
+180.0˚.
kHeadingStatus
(Component IDs 79
d
)
The heading status provides an indication of the uncertainty of the heading. “1”
represents a heading uncertainty of <2°, “2” means the heading uncertainty is
approximately 2° to 10°, and “3” means the uncertainty is >10°.
Quaternion (Component ID 77
d
)
The quaternion values generated by the TRAX algorithm are output in one data
package that contains the four quaternions. The quaternions are output as Q0, Q1,
Q2, and Q3, where Q3 is the scalar quaternion. When in AHRS Mode, heading,
pitch, and roll are subsequently calculated from these quaternions.
kTemperature (Component ID 7
d
)
This value is provided by the device’s internal temperature sensor. Its value is in
degrees Celsius and has an accuracy of ±3° C.
kDistortion (Component ID 8
d
)
This flag indicates at least one magnetometer axis reading is beyond ±125 µT. It
is only applicable in Compass Mode, and will always read “FALSE” in AHRS
Mode.
kCalStatus (Component ID 9
d
)
This flag indicates the user calibration status. False means it is not user calibrated
and this is the default value.