3 configuration in the bus system 3.3.1 – NORD Drivesystems BU0570 User Manual
Page 15
3 Commissioning
BU 0570 GB-0312
Subject to technical amendments
15
3.3 Configuration in the Bus system
3.3.1
Integration into TwinCAT System Manager (Example)
In the following, the integration of the SK TU3-ECT into the Beckhoff TwinCAT System Manager will be
explained. All modules must be connected and supplied with power.
Reboot of TwinCAT in config. mode via
or Shift + F4.
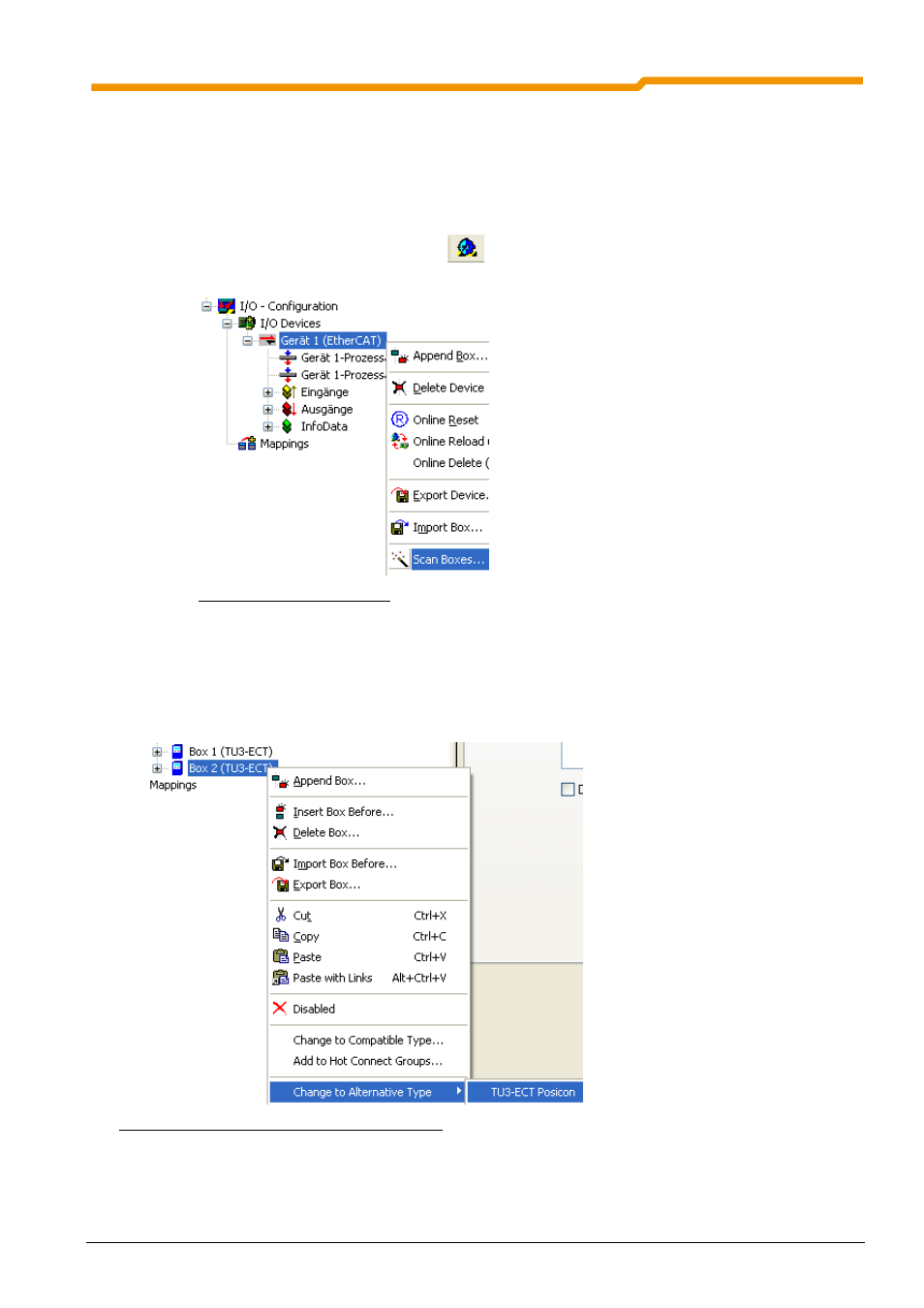
Scan the EtherCAT bus for connected units. See following diagram.
Fig. 7 Scanning the EtherCAT bus
The SK TU3-ECT modules which are found will be listed in the structural diagram
If an FI is to by parameterised with POSICIN or SERVO functionality via the System Manager, the
scanned type must be changed (Change to Alternative Type): see the following diagram. An
extended XML file containing the additional parameters will then be loaded. This step only needs to
be carried out once.
Fig. 8 Calling up the function "Change to Alternative Type"
With this, the SK TU3-ECT units are then integrated