I/o configuration – Lincoln Electric IM866 POWER REAM User Manual
Page 10
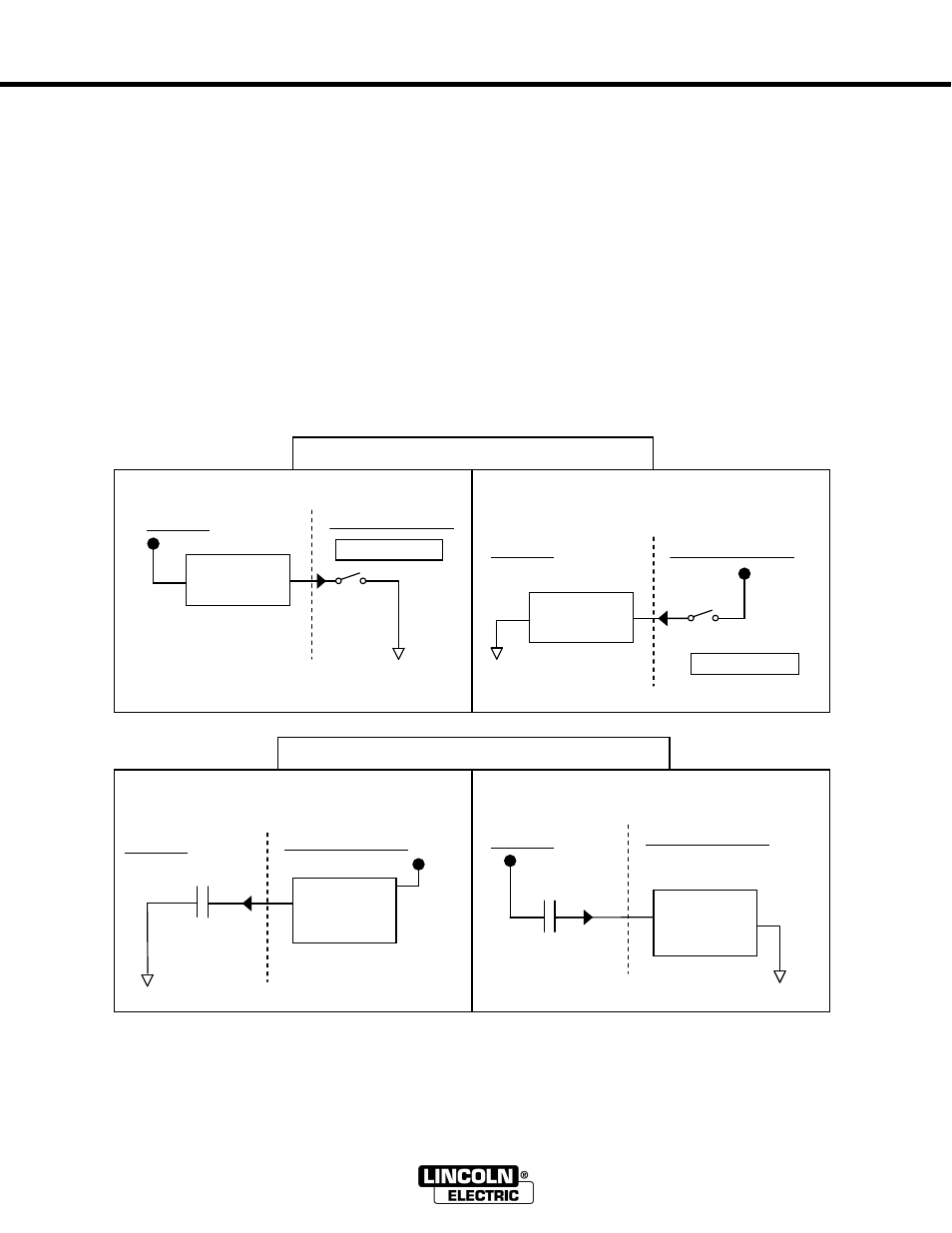
I/O Configuration
- 10 -
POWER REAM
*
Sinking Output: 0V when active
Sourcing Output: +24V when active
Active Low Input: 0V when activated
Active High Input: +24V when activated
Fanuc robots use the following output methods
Process I/O: Sink Output
Terminal I/O: Source Output
Model A I/O: Source Output
I/O Explanation
The terms sinking and sourcing define the direction of DC current flow in a load.
A sinking output provides a path to 0V for the load. Common terms used to describe sinking devices
include NPN, Open Collector, Active Low and IEC Negative Logic. An active low input is connected to
the positive supply (+24V) to detect a sinking output.
A sourcing output provides the power to the load. Common terms used to describe sourcing devices
include PNP, Open Emitter, Active High and IEC Positive Logic. An active high input is connected to 0V
to detect a sourcing output.
Factory set options: Active high robot input. Sinking robot output.
*
ROBOT INPUT TYPE
+24V
ROBOT OUTPUT TYPE
Input
Circuitry
(< 1mA)
ROBOT
POWER REAM
SINKING
OUTPUT*
0V
+24V
Input
Circuitry
(<1mA)
ROBOT
POWER REAM
SOURCING
OUTPUT
0V
+24V
Input
Circuitry
ROBOT
POWER REAM
ACTIVE LOW
INPUT
0V
+24V
Input
Circuitry
ROBOT
POWER REAM
ACTIVE HIGH
INPUT*
0V
Max. current is 1A
Max. current is 1A
*
+24V