Basic control strategies and terms – Watlow Optimizing Your Process System with the Series 988 Controller User Manual
Page 13
Optimizing Your Process System with the WATLOW Series 988
Basic Control Strategies and Terms
2.3
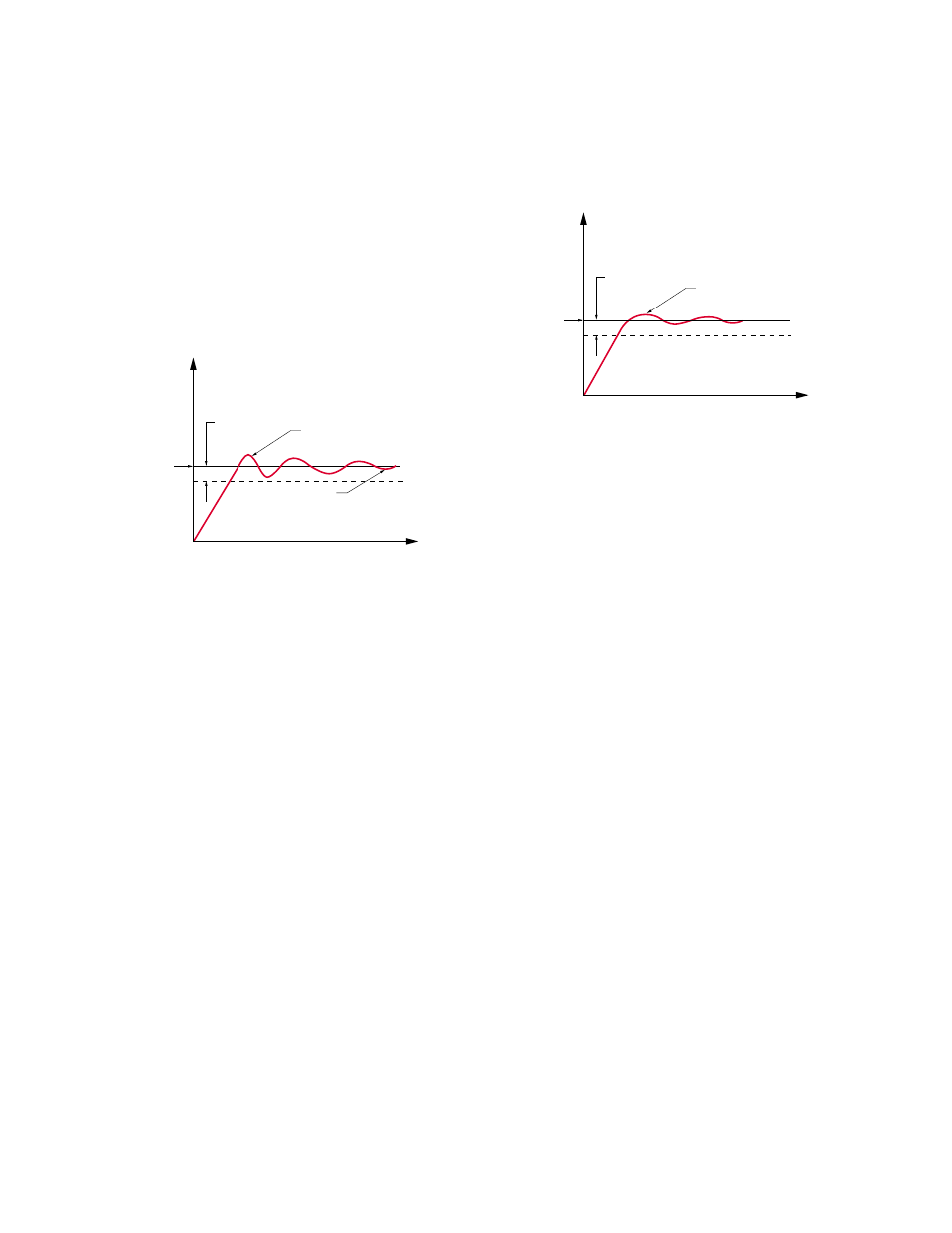
a droop condition before it exists. An integra-
tion function takes place that automatically
compensates for the difference between set
point and the actual process. This integration
automatically drives the process toward set
point. Integration action is prevented until the
process enters the proportional band. If it was
Proportional
Band
Time Proportioning
With Automatic Reset
Time
Temperature
Set
Point
Droop
Overshoot
Proportional
Band
PID -Time Proportioning
With Auto Reset & Rate
Time
Temperature
Set
Point
Reduced Overshoot
allowed to take place at any point, it would
cause a condition of extreme overshoot. This
function of eliminating the integration outside
of the proportional band is referred to as “anti-
reset windup.”
Derivative
As all of the graphs have illustrated, overshoot
occurs with any of the previous control meth-
ods. Overshoot may be hazardous to certain
processes. It is preventable with a control
function known as “derivative” (rate).
Derivative is an anticipatory function in a
process control that measures the rate of
change of the process and forces the control
into a proportioning action on an accelerated
basis to slow that change. This action prevents
a large degree of overshoot on start-up and also
functions to prevent overshoot when system
disturbances would tend to drive the process
up or down. A proportioning control with
integral and derivative (PID) control provides
the type of control required for difficult pro-
cesses with frequent system disturbances or
applications that need precision control.
Control System Tuning
In this phase of making the system work, we
will focus on the process controller as the
primary component of a closed-loop system
that must be adjusted for optimum perfor-
mance. These adjustments provide a means to
compensate for system problems. For instance,
when the sensor cannot be placed in the most
desirable location because of physical limita-
tions, a PID controller can compensate for the
sensor’s resulting thermal lag problem.
Tuning Methods
Process controls are tuned manually or auto-
matically. Manual tuning requires manually
setting each of the controller’s operating pa-
rameters. Automatic tuning, or auto-tuning, is
accomplished by the 988’s digital, microproces-
sor-based, electronic circuitry. The controller
uses a program inside its memory that will
calculate the correct setting for each of the
controller parameters. For more information on
auto-tuning with the Series 988 refer to page
3.2.
Manual Tuning
The following steps are generally applicable to
most manually set process controllers. Please
take note of a few precautions:
• Take your time in tuning the control system.
If you do it right, it will work a long time
without further attention.
• Do not change more than one control adjust-
ment at a time, allowing the system to settle
Profile developed by a proportional plus
integral plus derivative (PID) control
Profile developed by a proportional plus
integral control