Warner Electric XCTRL-2DRV User Manual
Page 20
20 Warner Electric • +33 (0) 2 41 21 24 24
P-2097-WE-A4
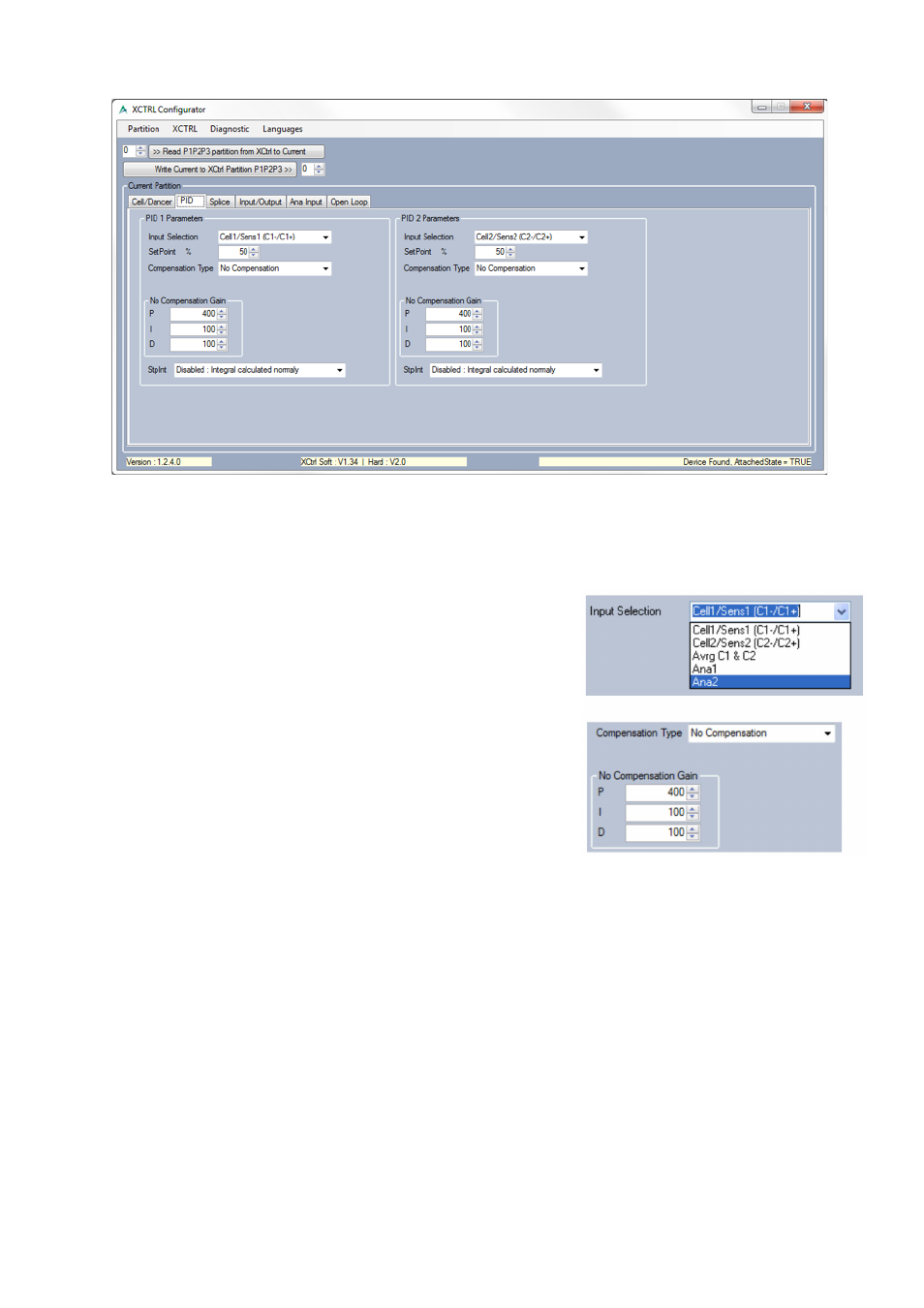
4. PID Setting
The PID tab is defining all PID controller parameters: PID Input selection, PID Automatic and linear
compensation, PID gains. The setpoint as well as the Stop Integral (StpInt) behavior can be also set-up in
this menu.
• Select the Input
With the drop down menu, it could be a dancer arm, one load
cell or two load cells. The input could be an auxiliary sensor
wired on Ana 1 or 2.
• Set up the SetPoint
Depending of the unit previously programmed the SetPoint’s unit
changes.
• Enter the Gains
With the drop down menu, you can directly enter the gain value
or increase it one by one. Gains are needed for the Proportional,
Integral and Derival correction
• Compensation
Depending of the application it’s sometimes useful to implement a PID Compensation. The compensation is
usually needed when the difference between the maximum and the minimum diameter of the roller exceed a 10
factor. Two compensation types are available: an automatic compensation and an external linear compensation.
-
Automatic compensation: with the automatic compensation, no external sensor is needed. The PID
controller is adjusting automatically its gain between the Big and Small roller diameter gains entered.