2 detail explanation of parameters – IAI America ACON-CY User Manual
Page 90
78
6. Parameter Settings
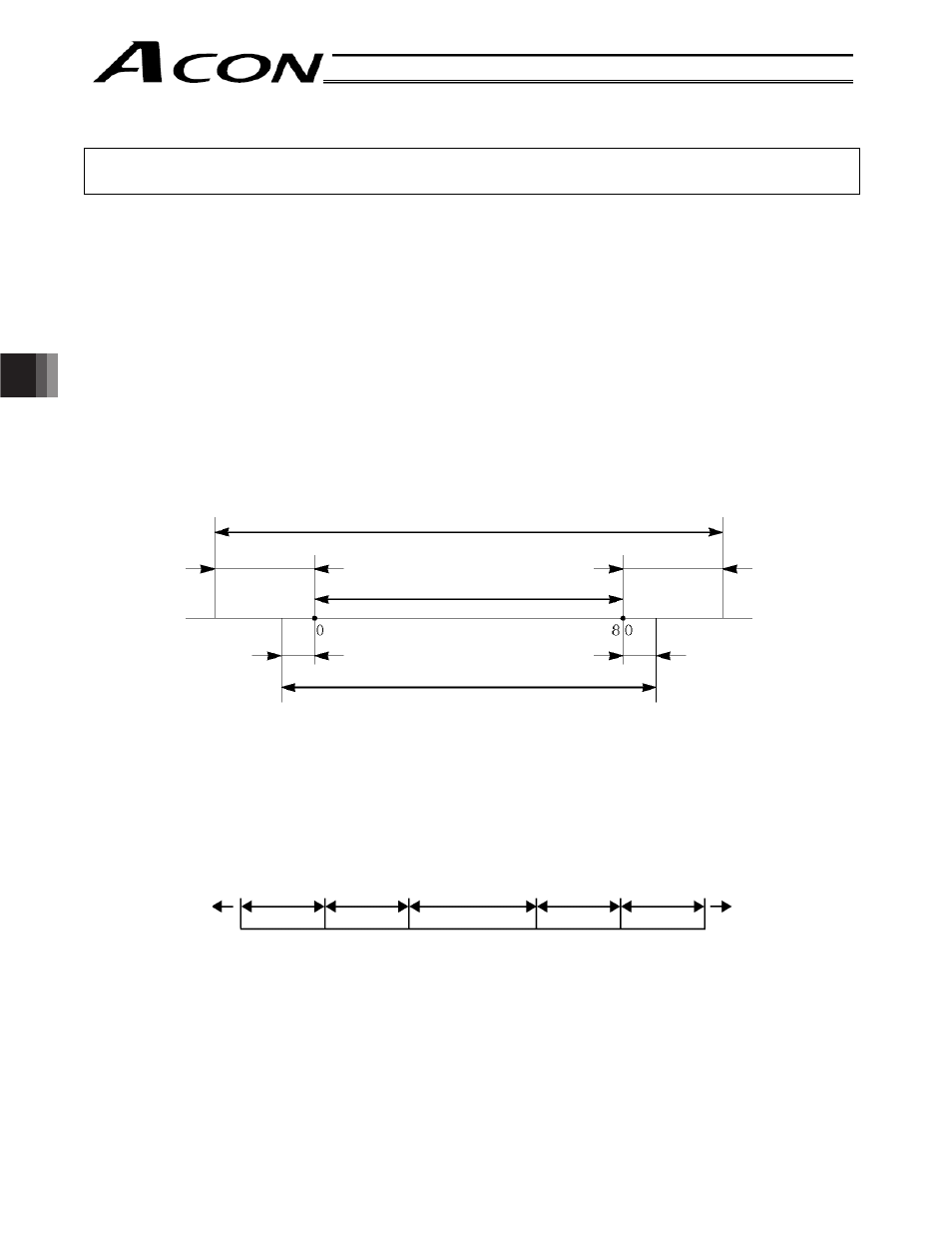
Error detection
range
Software limit
margin
Software
limit
Stroke
Software
limit
Software limit
margin
Error detection
range
6.2
Detail Explanation of Parameters
If you have changed any parameter, be sure to restart the controller via a software reset or reconnect the
controller power.
6.2.1
Parameters Relating to Actuator Stroke Range
z Soft Limits (No. 3/4 LIMM/LIML)
Set the + soft limit in parameter No. 3 and – soft limit in parameter No. 4.
Both parameters have been set to the effective actuator length at the factory. Change the parameter settings if
necessary, such as when an obstacle is present and collision between the actuator and obstacle must be
prevented or when the actuator must be operated beyond the effective length.
Exercise due caution when setting these parameters, as wrong settings will cause collision with the mechanical
end.
The minimum setting unit is 0.01 mm.
(Note) To change these parameters, set values corresponding to positions that are 0.3 mm wider than the
desired effective range.
Example) Set the effective range to between 0 and 80 mm
Parameter No. 3 (+ side): 80.3
Parameter No. 4 (– side): -0.3
z Software limit margin (No. 88 SWLM)
A “software limit over error” occurs if the actuator exceeds the software limit.
By setting parameter No. 88, it is possible to suppress detection of errors for the range from the software limit to
the setting value of parameter No. 88.
The minimum setting range is 0.01 mm.
Soft limits set in the controller
Approx. 0.3 mm
Effective range
Approx. 0.3 mm
Approx. 0.1 mm
Approx. 0.1 mm
Jogging/inching range permitted after homing