Caution – IAI America IX-NNN3515 User Manual
Page 29
21
5. Precautions for Use
(2) CP operation (Set using the SEL language commands ACC and DCL.)
z To operate the robot at the maximum acceleration/deceleration, provide a stopping period of three
seconds or more after each acceleration/deceleration.
z Start from the appropriate reference setting for acceleration/deceleration during continuous operation, and
then gradually raise the value for the purpose of adjustment.
z If an overload error occurs, lower the acceleration/deceleration setting as appropriate or provide an
appropriate stopping time following each acceleration/deceleration.
z Depending on the position of the vertical axis, the robot may generate vibration when axis 1, axis 2 or the
rotational axis turns. If vibration occurs, lower the acceleration/deceleration as appropriate.
z To move the robot horizontally at high speed, keep the vertical axis as close as possible to the top
position. If the vertical axis is operated at the bottom position, the spline shaft for the ball screw will bend
and the vertical axis will be disabled.
z Keep the permissible moment of inertia of axis 4 to 0.015 kgm
2
or less.
z The carrying load indicates a load above the rotational center of axis 4.
z Operate the robot by using an appropriate acceleration/deceleration coefficient as determined by the mass
of the tip. Failure to do so may cause the drive part to wear prematurely or may result in damage or
vibration.
Caution
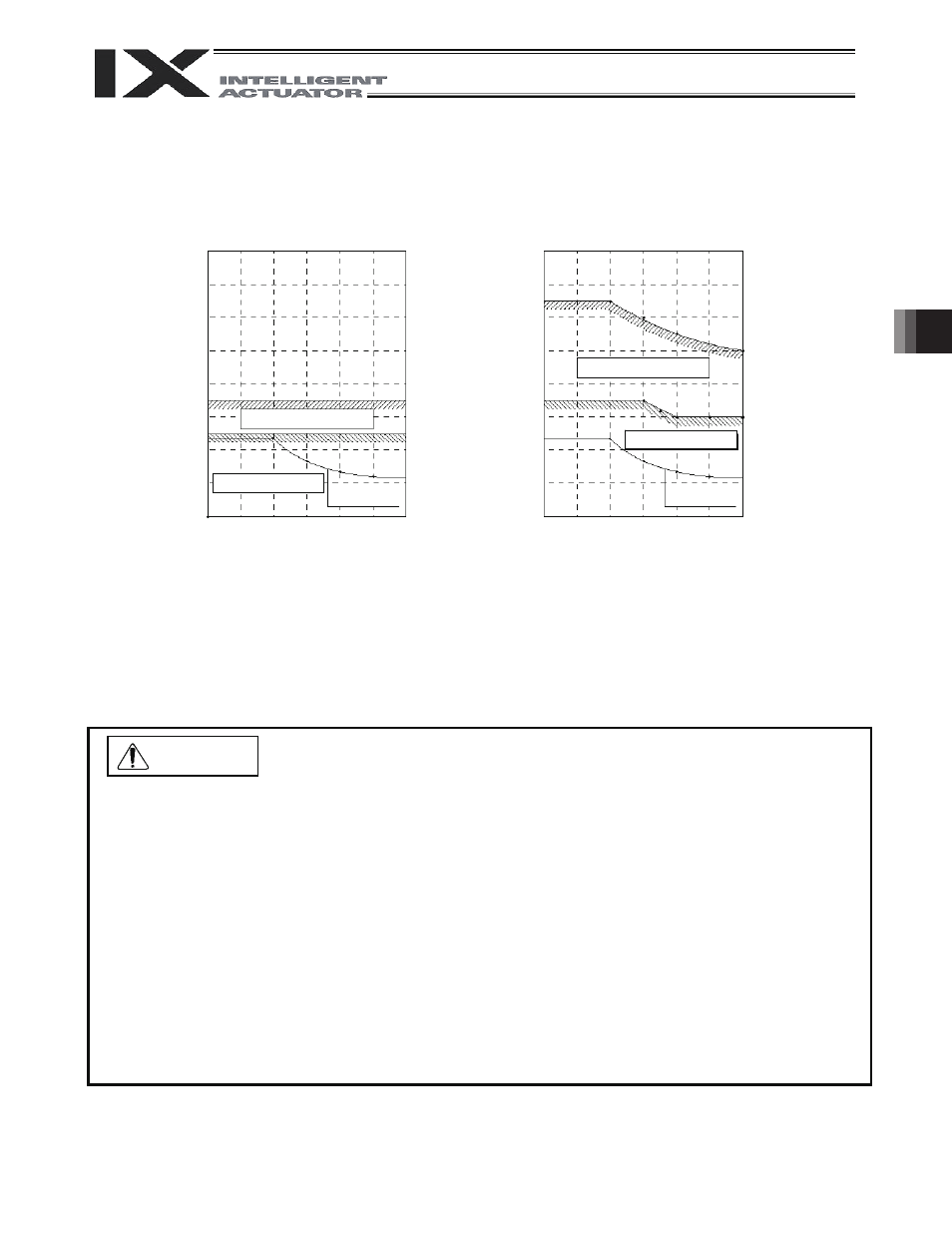
Arm length 250
Reference acceleration/deceleration
settings for CP operation
Arm length 350
Reference acceleration/deceleration
settings for CP operation
A
ccel
eration/
deceleration (G)
A
ccel
eration/
deceleration (G)
Reference range of
maximum setting
Reference range of
maximum setting
Reference range for
continuous operation setting
Reference range for
continuous operation setting
Line of reference range of
continuous operation with
vertical axis
Carrying load mass (kg)
Carrying load mass (kg)
1.6
1.2
0.8
0.4
0
0
1
2
3
1.6
1.2
0.8
0.4
0
0
1
2
3
Line of reference range of
continuous operation with
vertical axis