Atmel can controller, 1 can controller description – Rainbow Electronics T89C51CC01 User Manual
Page 71
71
T89C51CC01
Rev. D – 17-Dec-01
15. Atmel CAN
Controller
The Atmel CAN Controller provides all the features required to implement the serial
communication protocol CAN as defined by BOSCH GmbH. The CAN specification as
referred to by ISO/11898 (2.0A & 2.0B) for high speed and ISO/11519-2 for low speed.
The CAN Controller is able to handle all types of frames (Data, Remote, Error and Over-
load) and achieves a bitrate of 1 Mbit/s at 8MHz
1
Crystal frequency in X2 mode.
Notes:
1. At BRP = 1 sampling point will be fixed.
15.1 CAN Controller
Description
The CAN Controller accesses are made through SFR.
Several operations are possible by SFR:
arithmetic and logic operations, transfers and program control (SFR is accessible by
direct addressing).
15 independent message objects are implemented, a pagination system manages their
accesses.
Any message object can be programmed in a reception buffer block (even non-consec-
utive buffers). For the reception of defined messages one or several receiver message
objects can be masked without participating in the buffer feature. An IT is generated
when the buffer is full. The frames following the buffer-full interrupt will not be taken into
account until at least one of the buffer message objects is re-enabled in reception.
Higher priority of a message object for reception or transmission is given to the lower
message object number.
The programmable 16-bit Timer (CANTIMER) is used to stamp each received and sent
message in the CANSTMP register. This timer starts counting as soon as the CAN con-
troller is enabled by the ENA bit in the CANGCON register.
The Time Trigger Communication (TTC) protocol is supported by the T89C51CC01.
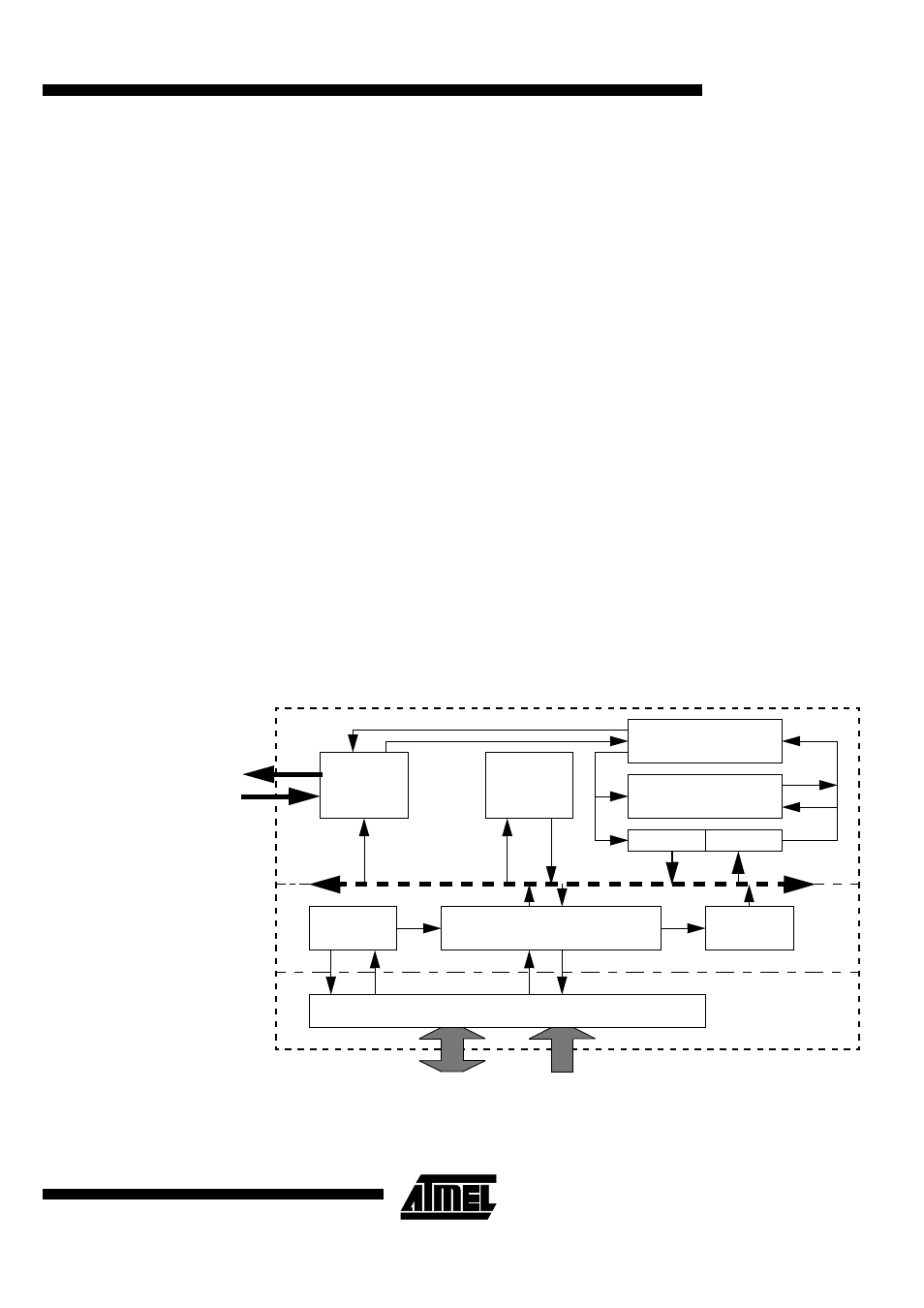
Figure 30. CAN Controller block diagram
Bit
Stuffing /Destuffing
Cyclic
Redundancy Check
Receive
Transmit
Error
Counter
Rec/Tec
Bit
Timing
Logic
Page
Register
DPR(Mailbox + Registers)
Priority
Encoder
µC-Core Interface
Core
Control
Interface
Bus
TxDC
RxDC