7 holding brakes, Rotation, Mecha – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Command Option Interface User Manual
Page 110
4 Operation
4.2.7 Holding Brakes
4-14
4.2.7 Holding Brakes
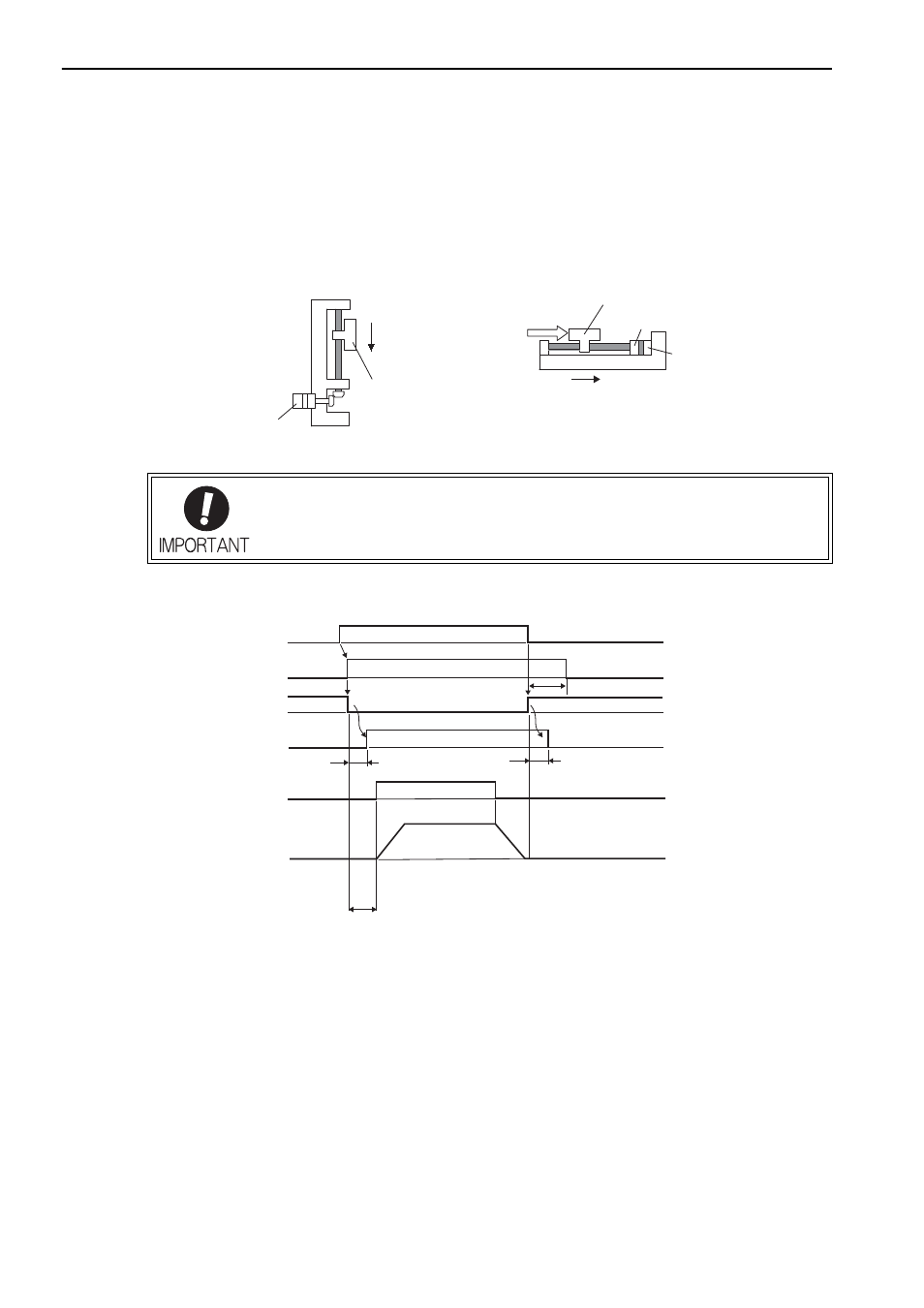
A holding brake is a brake that is used to hold the position of the movable part of the machine when the SER-
VOPACK and converter are turned OFF so that movable part does not move due to gravity or external forces.
Holding brakes are built into servomotors with brakes.
The holding brake is used in the following cases.
There is a delay in the braking operation. Set the following ON/OFF timing.
∗1. For details, refer to the manual of the connected command option module.
∗2. Use Pn506, Pn507, and Pn508 to set the timing of when the brake will be activated and when the servomotor power
will be turned OFF.
∗3. After the Servo ON command has been turned ON and 50 ms has passed since the brake was released, output the ref-
erence from the host controller to the SERVOPACK.
• The brake built into the servomotor with brakes is a de-energization brake, which is
used only to hold and cannot be used for braking. Use the holding brake only to hold
a stopped servomotor.
Servomotor
Vertical Shaft
Holding brake
Shaft with External Force Applied
Movable part of machine
Holding brake
Movable part of
machine
Servomotor
External
force
Prevents the movable part (table)
from moving due to external force.
Prevents the
movable part from
moving due to its
own weight when the
power is OFF.
Rotation
*4
*3
0
*4
*2
Servo ON command
*1
Servomotor power
Brake signal (/BK)
Brake contact part
(lining)
Position reference/
Speed reference
Motor speed
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
Brake release
Brake applied
Brake applied
MECHA