D2 reference (speed command) limits – Yaskawa iQpump Programming Manual User Manual
Page 38
38
YASKAWA
TM.iQp.02 iQpump Drive Programming Manual
◆
d2 Reference (Speed Command) Limits
■
d2-01 Frequency Reference Upper Limit
Setting Range:
0.0 to 110.0%
Factory Default: 100.0%
■
d2-02 Frequency Reference Lower Limit
Setting Range:
0.0 to 110.0%
Factory Default: 0.0%
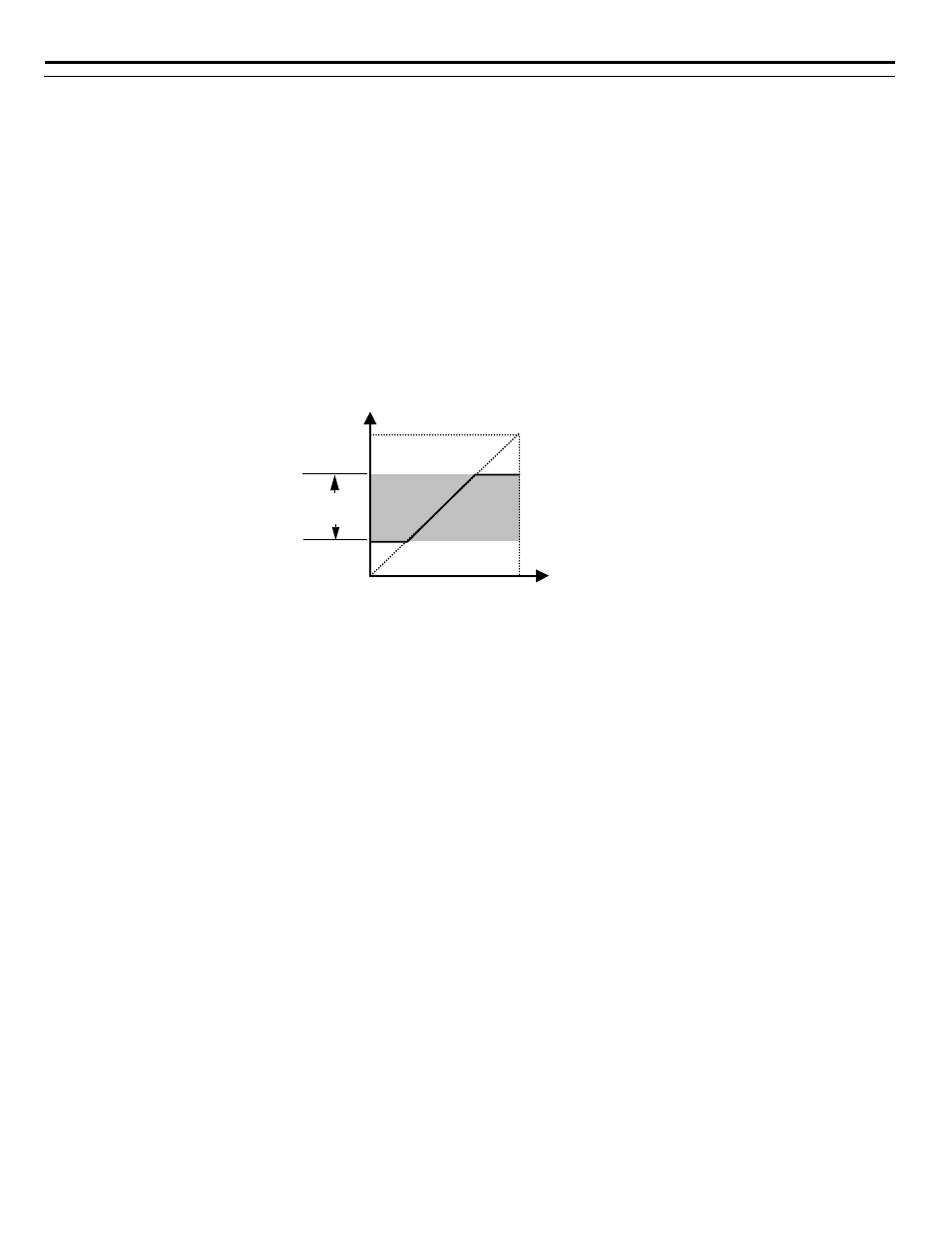
The use of parameters d2-01 and d2-02 places limitations on the speed command that the iQpump drive will accept. The parameters are
set in units of percentage of the maximum frequency (E1-04) and provide limits on any remote speed command input. By entering upper
or lower frequency limits, the iQpump drive programmer can prevent operation of the iQpump drive above or below levels that may
cause resonance, equipment damage or discomfort (see also parameter d3-0X). For example, limits may be needed to prevent low speed
operation of: Cooling tower fans with gear boxes, pumps with pressure dependent seals, or AHUs with minimum delivery requirements.
Figure 1.29
Figure 29 Frequency Reference Upper and Lower Limit Effects on the Speed Command
■
d2-03 Master Speed Reference Lower Limit
Setting Range:
0.0 to 110.0%
Factory Default: 0.0%
Unlike Frequency Reference Lower Limit (d2-02) which will affect the speed command no matter where it is sourced from (i.e. analog
input, preset speed, jog speed, etc.), the Master Speed Reference Lower Limit (d2-03) sets a low speed threshold that will only affect the
analog input that is the active master speed frequency (as determined by parameter H3-13 and H3-09). This parameter allows a minimum
speed to be programmed for the master reference while allowing a lower speed to be set as a jog reference. If the speed commanded by
the active master speed frequency is below the setting of d2-03, then the iQpump drive will operate at the speed specified by d2-03.
d2-01
d2-02
Frequency Reference Upper Limit
Frequency Reference Lower Limit
Internal Speed Command
Set Speed Command
Note: See also the “Sleep” function in Figure 1.19 for alternate “lower limit” implementation.
d2-01
d2-02
Operating
Range