P4-06 thrust bearing deceleration time, P4-07 feedback fault auto restart enable, P4-08 protection fault auto restart enable – Yaskawa iQpump Programming Manual User Manual
Page 166
166
YASKAWA
TM.iQp.02 iQpump Drive Programming Manual
■
P4-06 Thrust Bearing Deceleration Time
<0032>
Setting Range:
0.0 to 6000.0 sec
Factory Default: 1.0 sec
This deceleration time will be used to bring the Drive from Thrust Frequency (P4-05) to a stop when the Thrust Mode is active. Any time
the Run Command is removed while the drive is operating in the Thrust Mode above the Thrust Frequency, this deceleration time will be
used once the frequency reference is at or below the Thrust Frequency.
Note: In the Auto Mode, the Minimum Pump Frequency (P1-06) will become the Thrust Frequency if smaller than the Thrust
Frequency (P4-05).
In the Hand Mode, the Minimum Pump Frequency (P1-06) will become the Thrust Frequency if smaller than the Thrust
Frequency (P4-05).
■
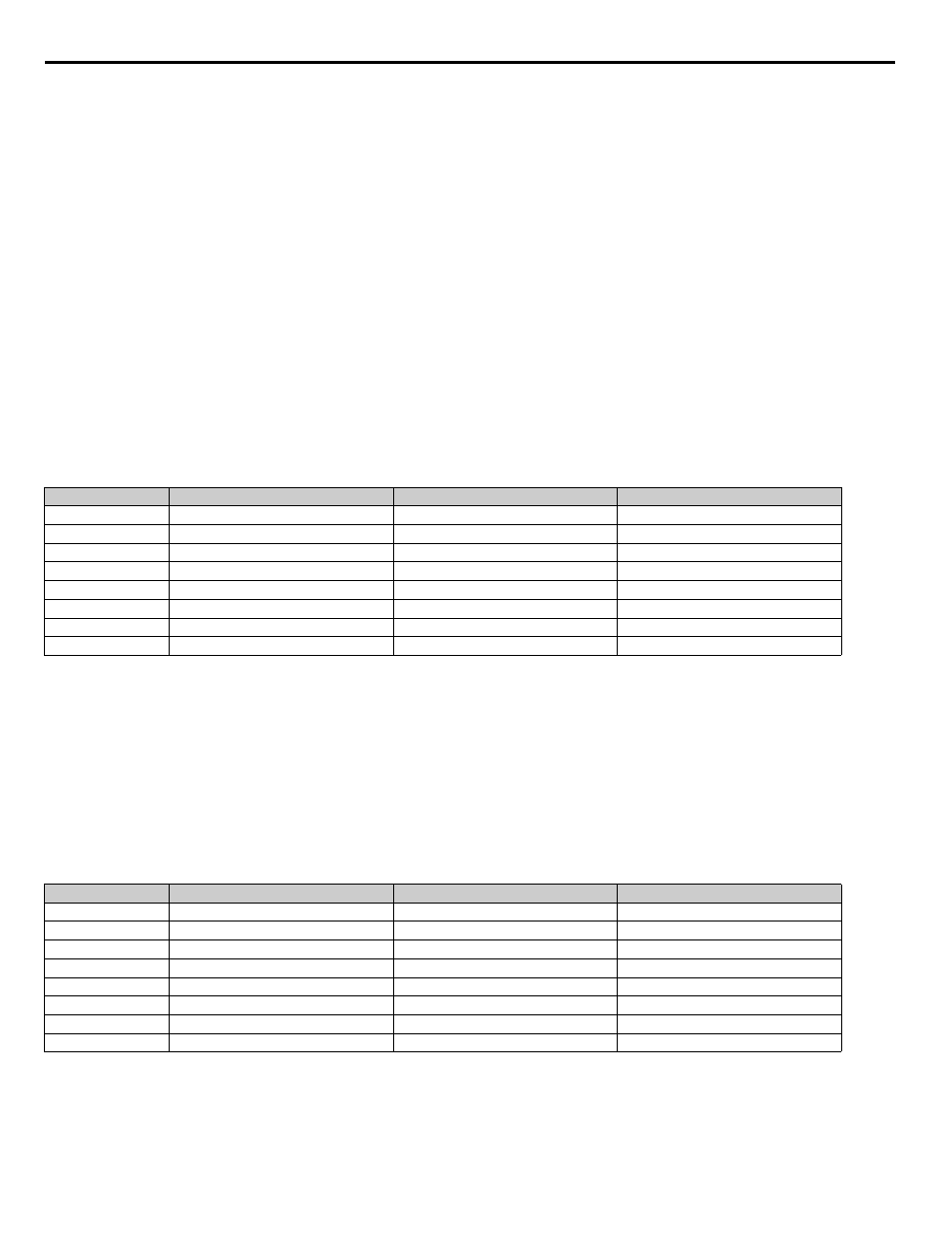
P4-07 Feedback Fault Auto Restart Enable
<0032>
Setting Range:
0 to 7
Factory Default: 0
Setting to enable / disable Auto Restart for the following iQpump transducer / feedback faults:
LL: Low Level Feedback (P1-07)
HL: High Level Feedback (P1-09)
TL: Transducer Loss (b5-12)
Note: Parameter L5-01 needs to be set to “1” and program L5-03 needs to be set to the applicable time.
■
P4-08 Protection Fault Auto Restart Enable
<0032>
Setting Range:
0 to 7
Factory Default: 0
Setting to enable / disable Auto Restart for the following iQpump protection faults:
SP: Not Maintaining Set-Point (P1-11)
LOP: Loss of Prime (P1-12)
POC: Pump Over Cycling (P2-08)
Note: Parameter L5-01 needs to be set to “1” and program L5-03 needs to be set to the applicable time.
Setting
TL
HL
LL
0:
Disable
Disable
Disable
1:
Disable
Disable
Enable
2:
Disable
Enable
Disable
3:
Disable
Enable
Enable
4:
Enable
Disable
Disable
5:
Enable
Disable
Enable
6:
Enable
Enable
Disable
7:
Enable
Enable
Enable
Setting
POC
LOP
SP
0:
Disable
Disable
Disable
1:
Disable
Disable
Enable
2:
Disable
Enable
Disable
3:
Disable
Enable
Enable
4:
Enable
Disable
Disable
5:
Enable
Disable
Enable
6:
Enable
Enable
Disable
7:
Enable
Enable
Enable