Adept T20 Pendant User Manual
Page 38
Chapter 3: Operation
Soft Key
Description
JogTo
Press and hold to move (jog) the robot to the selected position.
Appro
Press to bring the robot to the approach position for the selected
location. The approach position is the location less 'A' mm along
the Z-axis of the tool transformation (or offset), where 'A' is the
approach distance set on the System Maintenance screen.
Align
Aligns the robot tool Z-axis with the nearest world axis.
Next >
Goes to the next Available Locations screen.
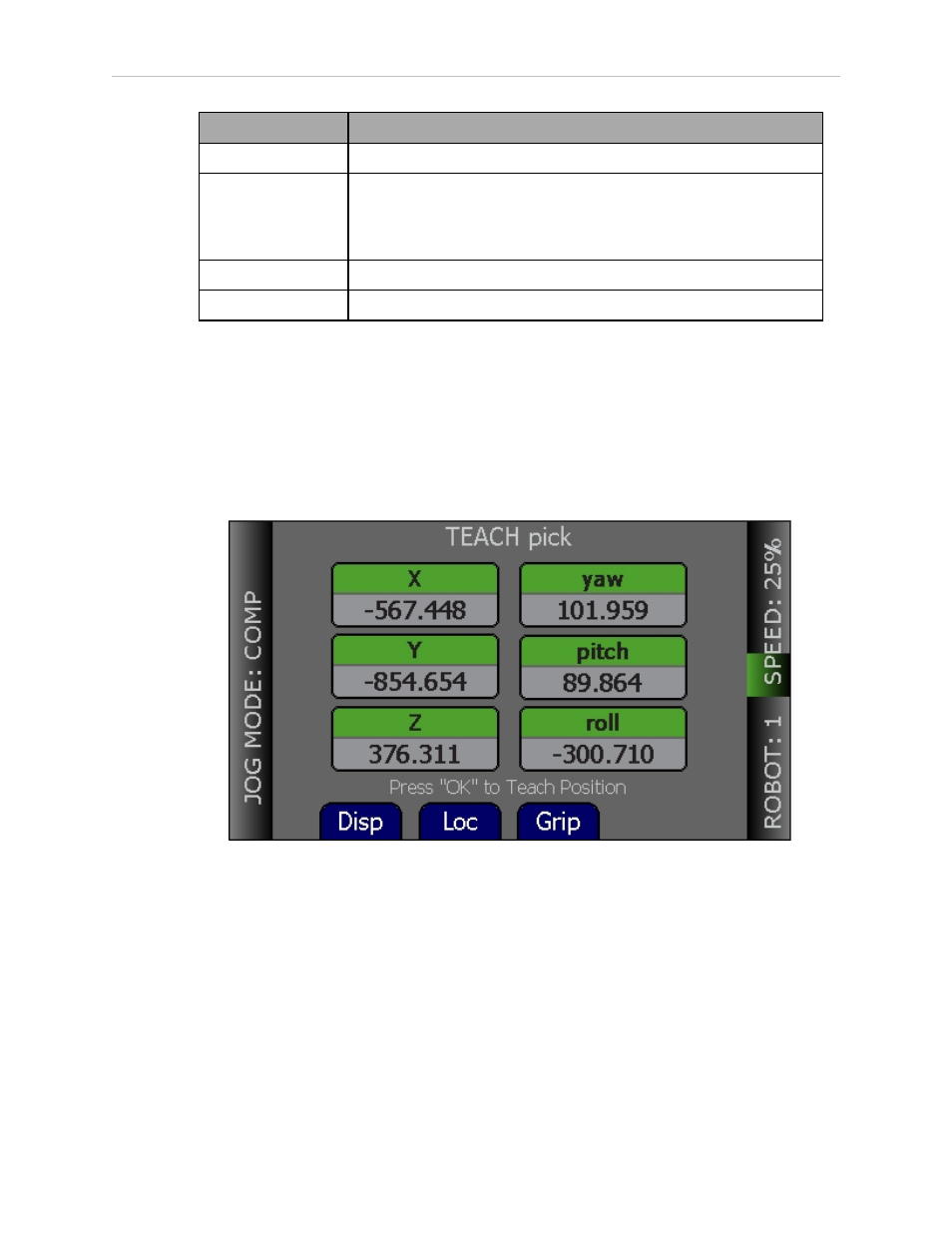
To teach a location:
1. From the Available Locations screen, press the arrow buttons to select the desired loc-
ation from the list of locations.
2. Press Teach. The Teach screen opens for the selected location.
3. Use the jog controls to position the robot at the desired location.
4. When the robot is at the desired location, press OK to teach the position.
Figure 3-18. Teach Screen
To select an array:
1. From the Available Locations screen, press the up/down arrow buttons to select the
desired array, and then press Expand. The valid members of the selected array are dis-
played.
2. Press the up/down arrow buttons to select the desired location.
Press Cancel to return to the previous screen.
Adept T20 Pendant User's Guide, Rev. C
Page 38 of 56