Tool mode – Adept T20 Pendant User Manual
Page 30
Chapter 3: Operation
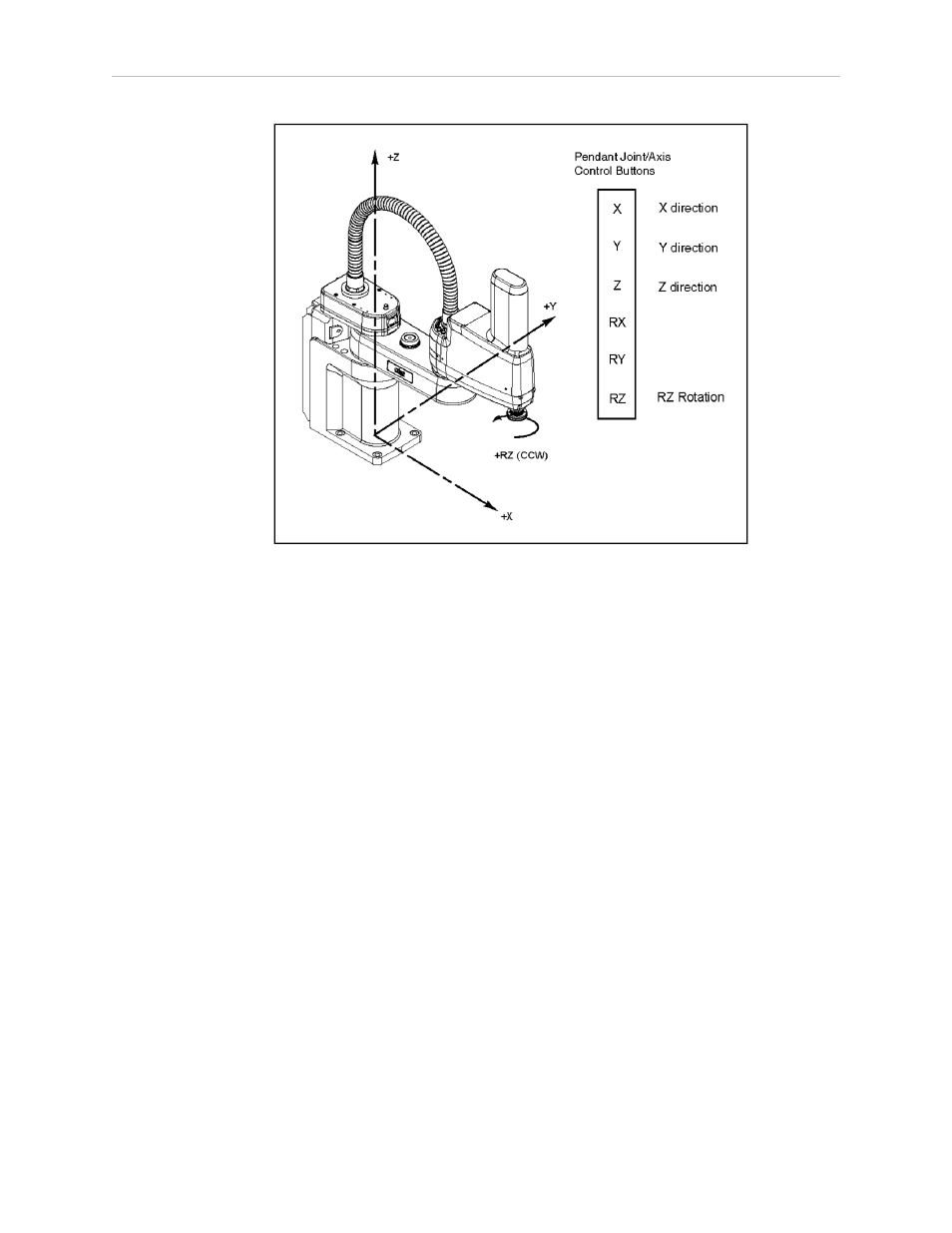
Figure 3-9. World Mode (Four-Axis Adept Cobra Robot Shown)
To position the robot while in World mode:
1. Press the Jog Mode button until World is displayed in the Jog Mode indicator.
2. Press and hold the '+' button to move the robot tool flange in the positive direction;
press and hold the '–' button to move the flange in the negative direction
Tool Mode
When Tool mode is selected, movement in the X, Y, or Z direction is along an axis of the Tool
coordinate system. The Tool coordinate system is centered at the robot tool flange with the Z-
axis pointing away from the flange. On most robots, the positive X-axis is aligned with the cen-
ter of the tool flange keyway.
Adept T20 Pendant User's Guide, Rev. C
Page 30 of 56