Free mode – Adept T20 Pendant User Manual
Page 31
3.5 Using Jog Mode
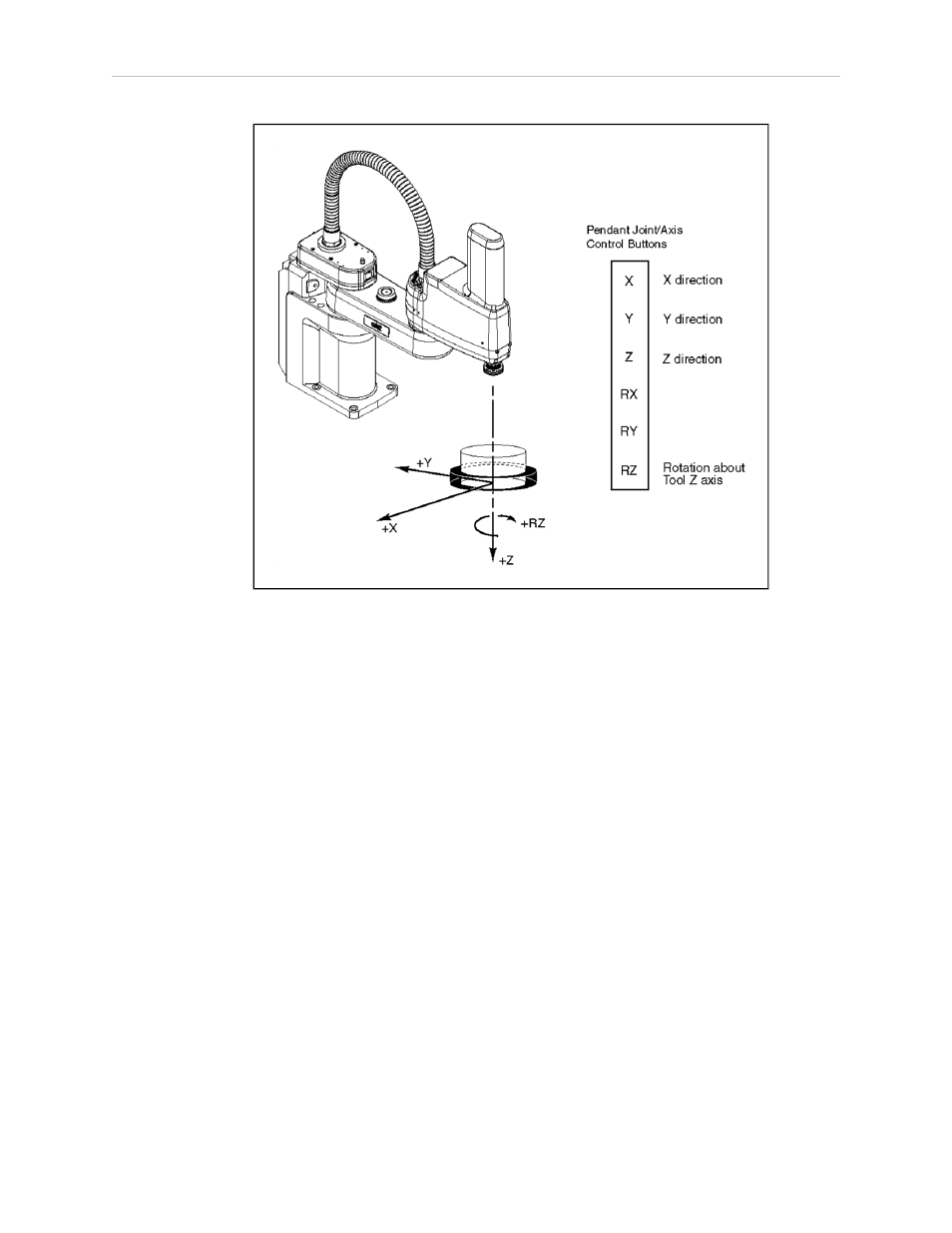
Figure 3-10. Tool Mode (Four-Axis Adept Cobra Robot Shown)
NOTE: The previous drawing assumes that the tool transformation is set to null
(all values are 0). If a tool transformation is in effect, the tool coordinate system will
be offset and rotated by the value of the tool transformation. Any motion in Tool
mode will now be relative to the offset coordinate system, and not the center of the
tool flange.
To position the robot while in Tool mode:
1. Press the Jog Mode button until Tool is displayed in the Jog Mode indicator.
2. Press and hold the '+' button to move the robot tool flange in the positive direction;
press and hold the '–' button to move the flange in the negative direction. In a four-axis
robot, positive rotation of the gripper (RZ) is clockwise as viewed from above.
Free Mode
When Free mode is selected, the motor torque will be zeroed and the brake (if any) for the selec-
ted joint will be released. You can make multiple selections with the Joint/Axis control buttons
to release as many joints as required.
To select Free mode, press the Jog Mode button until Free is displayed in the Jog Mode indic-
ator. As soon as another jog control mode is selected, all joints are returned to servo control
and will not move freely.
On some robots, Free mode is disabled for some of the joints.
Adept T20 Pendant User's Guide, Rev. C
Page 31 of 56