Fhr-35 pan and tilt head robotic ice tool – Vinten Radamec FHR-35 User Manual
Page 25
23
FHR-35
Pan and Tilt Head
Robotic
ICE Tool
Installation and Configuration Guide
Using ICE Tool
3.
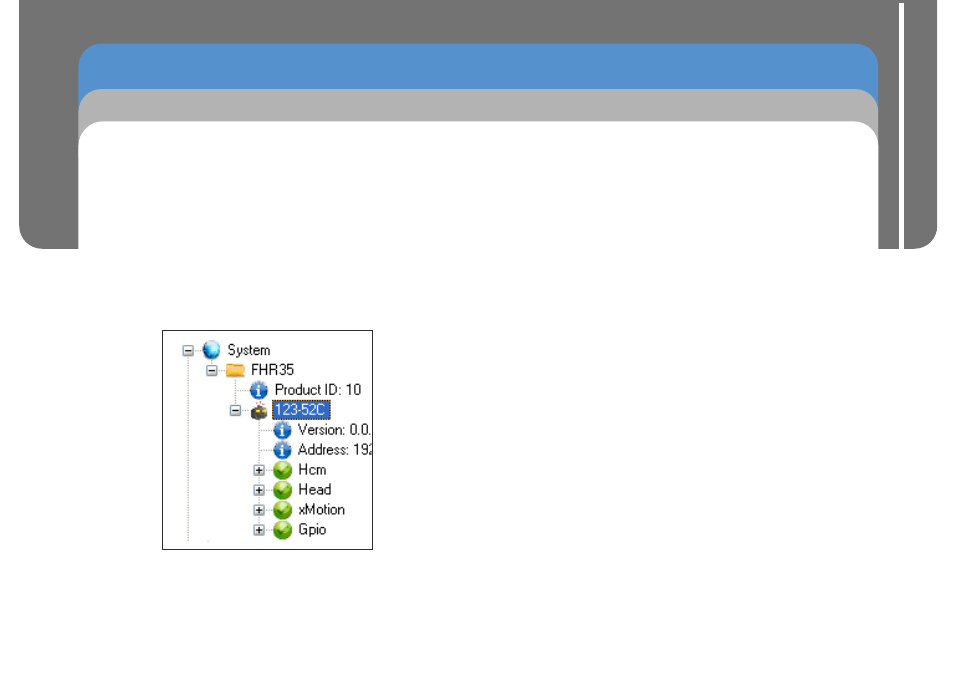
Display the Configuration window for the required head:
a) Expand the System tree structure.
b) Expand the FHR35 folder, to list all added heads.
c) Expand the Host ID of the required head.
d) Double-click the Head component to open the
Configuration window for the selected FHR-35 head.
In the Configuration window, the zero point position and the
soft limits can be set or changed. The head can be manually
moved to the required minimum and maximum positions and
the values stored
by the software.
(in degrees)
If the head is mounted in an inaccessible location, such as
ceiling or wall mounted, where manually moving the head is not
possible, the pan and tilt position values can be entered into the
pan and tilt fields.
Setting the Zero Position
1.
Manually move the head about the pan and tilt axes to
approximately the mid-
points within the set hard limits.
2.
Click the Set Zero button to store this position as zero
degrees in pan and tilt.
Setting a zero reference position before setting the soft limits
will make the configuration of the head easier. The zero
reference position for the tilt axis is, by default, when the
camera cradle is in the horizontal position (tilt lock engaged).
range
3.
Click Apply to
.
send and store the settings in the head
Setting the Zero Position and Soft Limits