Fhr-35 pan and tilt head robotic, Installation – Vinten Radamec FHR-35 User Manual
Page 22
FHR-35
Pan and Tilt Head
Robotic
20
Installation
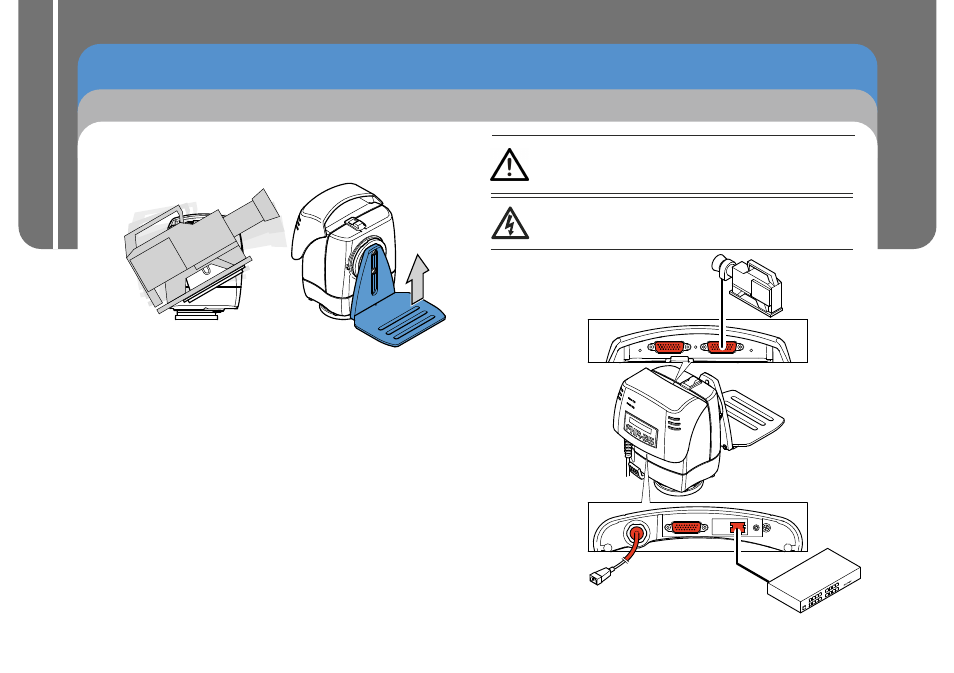
Balancing the Head
Installation and Configuration Guide
Electrical Connections
If the camera moves back towards the horizontal position when
released, the payload is mounted too low—raise the camera
cradle.
2.
Tilt the camera cradle through positive and negative angles
of travel, checking that the head remains at the angle of tilt it
is set to, unsupported.
If the camera cradle angle falls or rises, repeat the alignment
procedure until balance is achieved.
3.
After adjusting the C of G height it may be necessary to
check that the fore and aft balance remains satisfactory.
Readjust the position of the camera horizontally on the
camera cradle as required.
4.
After balancing, exercise the head through both axes to
confirm that it operates smoothly.
2.
Connect the
power cable
and the
Ethernet cable.
CAUTION! Connect the head to the power source using
the attached power cable only. Ethernet cables must be
rated at Cat5e with screened RJ45 connectors.
1.
Connect the lens interface
cable to the lens interface
connector on the FHR-35.
WARNING! The IEC connector is the primary
disconnect device and must be accessible both during
and after installation of the product.