Fhr-35 pan and tilt head robotic installation – Vinten Radamec FHR-35 User Manual
Page 20
18
FHR-35
Pan and Tilt Head
Robotic
Installation
Installation and Configuration Guide
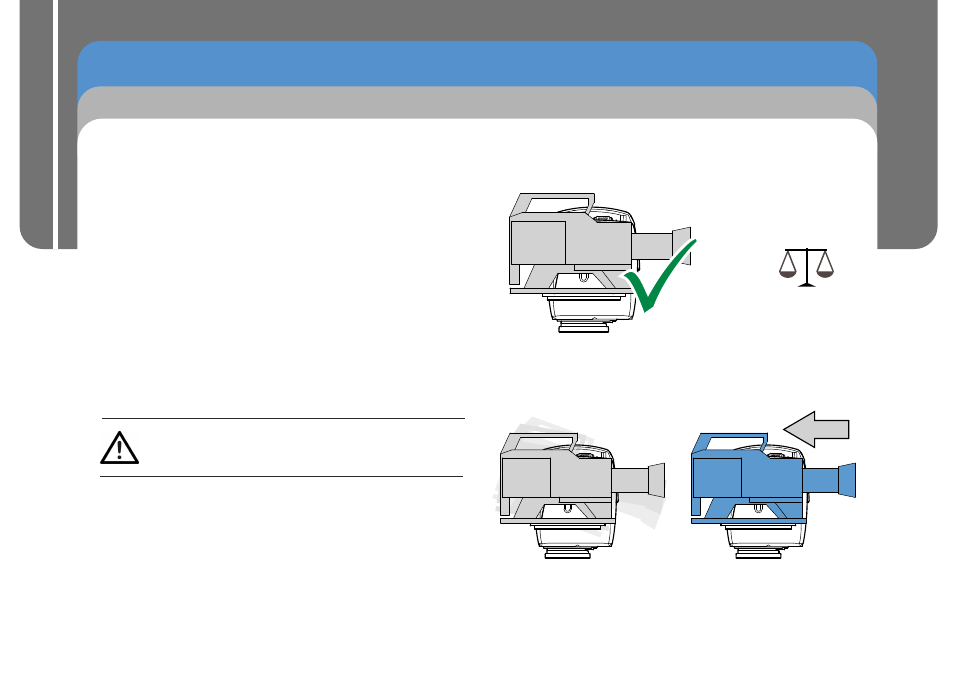
If the camera cradle stops in a horizontal position (camera
pointing directly forward) the balance is correct.
Setting the Fore/Aft Balance
Ensure that the head and camera cradle are level before
balancing. The camera and payload should be fitted on the
cradle so that the load is balanced. This can be achieved by
moving the camera forwards (Fore) or backwards (Aft) on the
cradle.
1.
Engage the tilt lock. Loosen the bolts securing the camera to
the cradle just enough to be able to slide the camera and
payload backwards and forwards.
2.
Hold and steady the camera cradle, and disengage the tilt
lock. Carefully release the camera cradle and observe how it
moves and where it stops.
If the camera cradle tilts forward (points downwards) then the
camera must be moved towards the rear of the head (aft).
CAUTION! Risk of damage to equipment. Be prepared
to prevent the camera and cradle from falling away
suddenly.
The FHR-35 is designed to allow the camera and payload to
swing about its own Centre of Gravity (C of G), as opposed to
balancing with the use of springs or cams. The camera and
payload are mounted onto the camera cradle so the resulting
C of G aligns with the tilt-axis pivot point, providing true
balance.
When the head is correctly balanced, the robotic drives will
need the minimum amount of effort to move the head. A
correctly balanced head and payload can be set to any tilt
position and the head will maintain that position ‘hands off’.
Balancing the Head