Fhr-35 pan and tilt head robotic installation – Vinten Radamec FHR-35 User Manual
Page 21
FHR-35
Pan and Tilt Head
Robotic
Installation
Balancing the Head
19
Installation and Configuration Guide
Note: If the camera has to be moved too far fore or aft to
balance the head, you can remove the camera cradle
base plate and refit it, using two screws, 50 mm further
in the required direction.
4.
Tighten the bolts securing the camera to the cradle and
recheck the horizontal balance. Readjust if necessary.
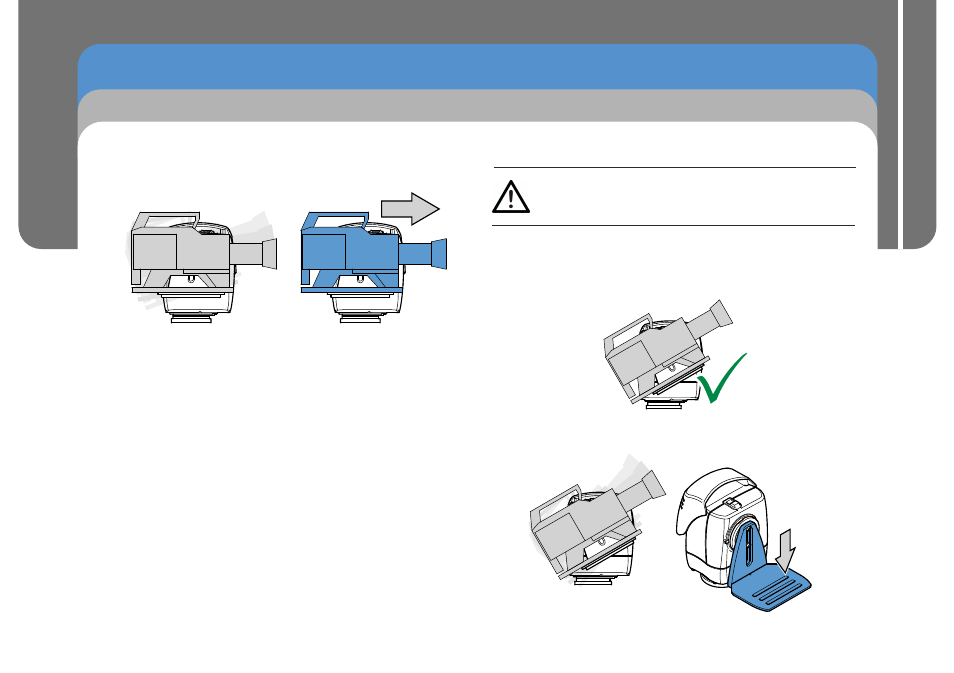
Adjusting the Centre of Gravity (C of G)
If the camera continues to move upwards after releasing the
camera cradle, the payload is mounted too high—lower the
camera cradle.
3.
Reposition the camera as required on the camera cradle and
secure in position. The horizontal balance is correct when
the camera cradle comes to rest in a horizontal position.
If the camera cradle tilts backwards (points upward) then the
camera must be moved towards the front of the head (fore).
1.
Tilt the camera approximately 30° upward and release it.
If the camera stays in the same position when released, the
payload is properly balanced with the C of G on the tilt axis.
CAUTION! Risk of damage to equipment. Be prepared
to prevent the camera and camera cradle from falling
away suddenly.