The star contactor is selected according to i, 34 · i, 3 = 0.58 · i – Rockwell Automation Low-Voltage Switchgear and Controlgear User Manual
Page 83
Faults like shown in
and
can also be avoided with the interruption-free
(closed transition) star-delta circuit (Section
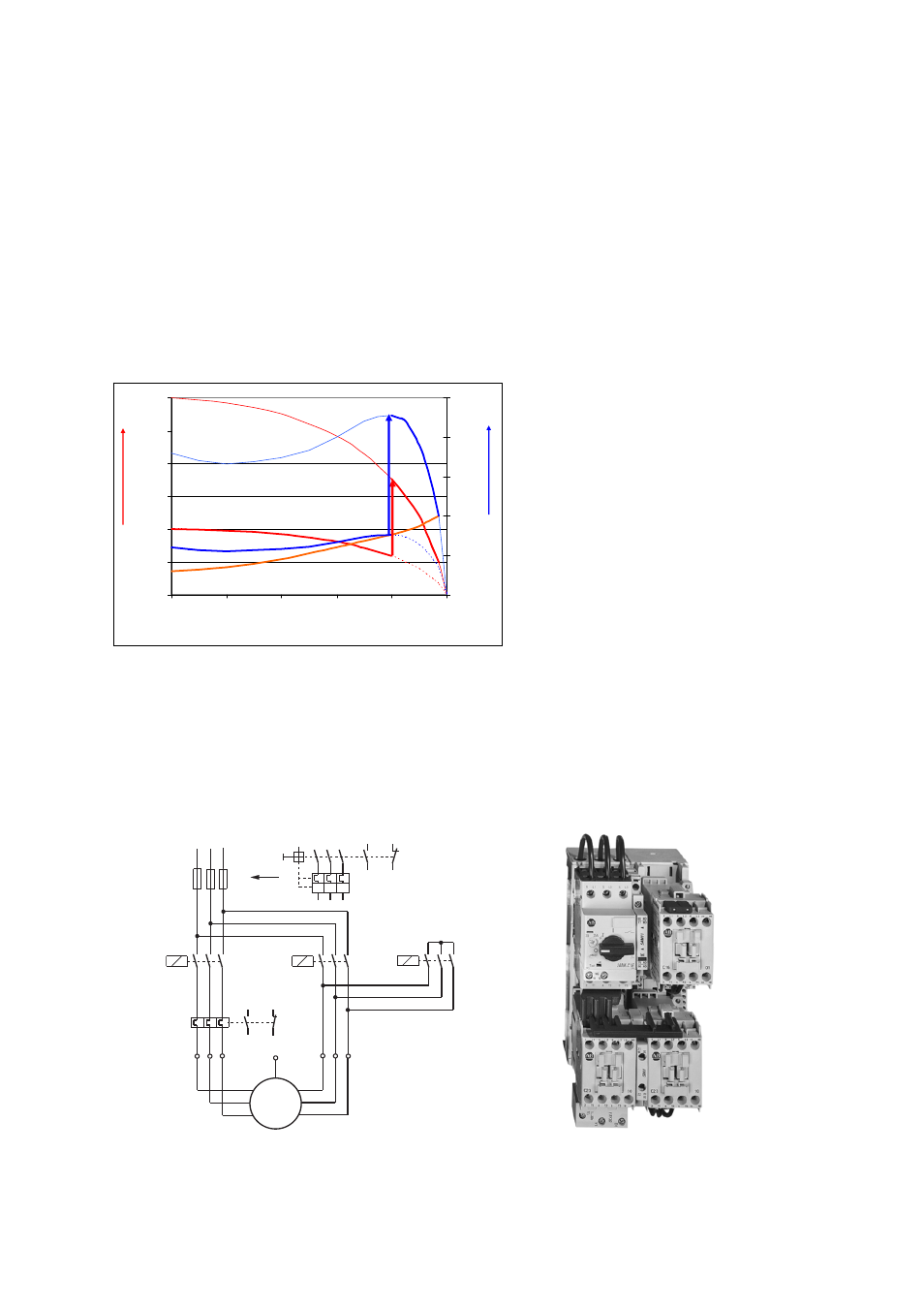
When the load torque is too high the star-connected motor only accelerates to a fraction of the
speed and “sticks” at this speed. The switching process would proceed as in
and the
purpose of the star-delta start up would not be achieved.
Moreover this condition means that the contactors have to switch off a multiple of the motor
rated current. In the example in
the breaking current is around 1.3 · I
emotor
. The star
contactor is selected according to I
e(Y contactor)
= 0.34 · I
emotor
(see below) and must accordingly
switch off
1.3/0.34
≈ 4 · I
e(Y contactor)
In practice this means AC-4 operation with a correspondingly reduced electrical life span. In this
case a motor for amplified star-delta starting (Section
) should be used.
0
20
40
60
80
100
n/n
s
[%]
0.00
0.50
1.00
1.50
2.00
2.50
T /T
e
T
Δ
T
Y
Fig. 3.3-5
Switching-over at speed- that is too low
Selecting the starter components
With star-delta circuits in accordance with
in delta mode the circuits of main contac-
tor, delta contactor and motor protection relays are connected in series to the motor windings
(
). The devices are therefore loaded with the phase current I
p
:
I
p
= I
e/
√3 = 0.58 · I
e
I
>
I
>
I
>
M
3~
U1
U2
V1
V2
W1
W2
Q1
B
A F1
Fig. 3.3-6
Starter for normal star-delta starting
LVSAM-WP001A-EN-P - April 2009
3-7