Rockwell Automation Low-Voltage Switchgear and Controlgear User Manual
Page 78
LVSAM-WP001A-EN-P - April 2009
3-2
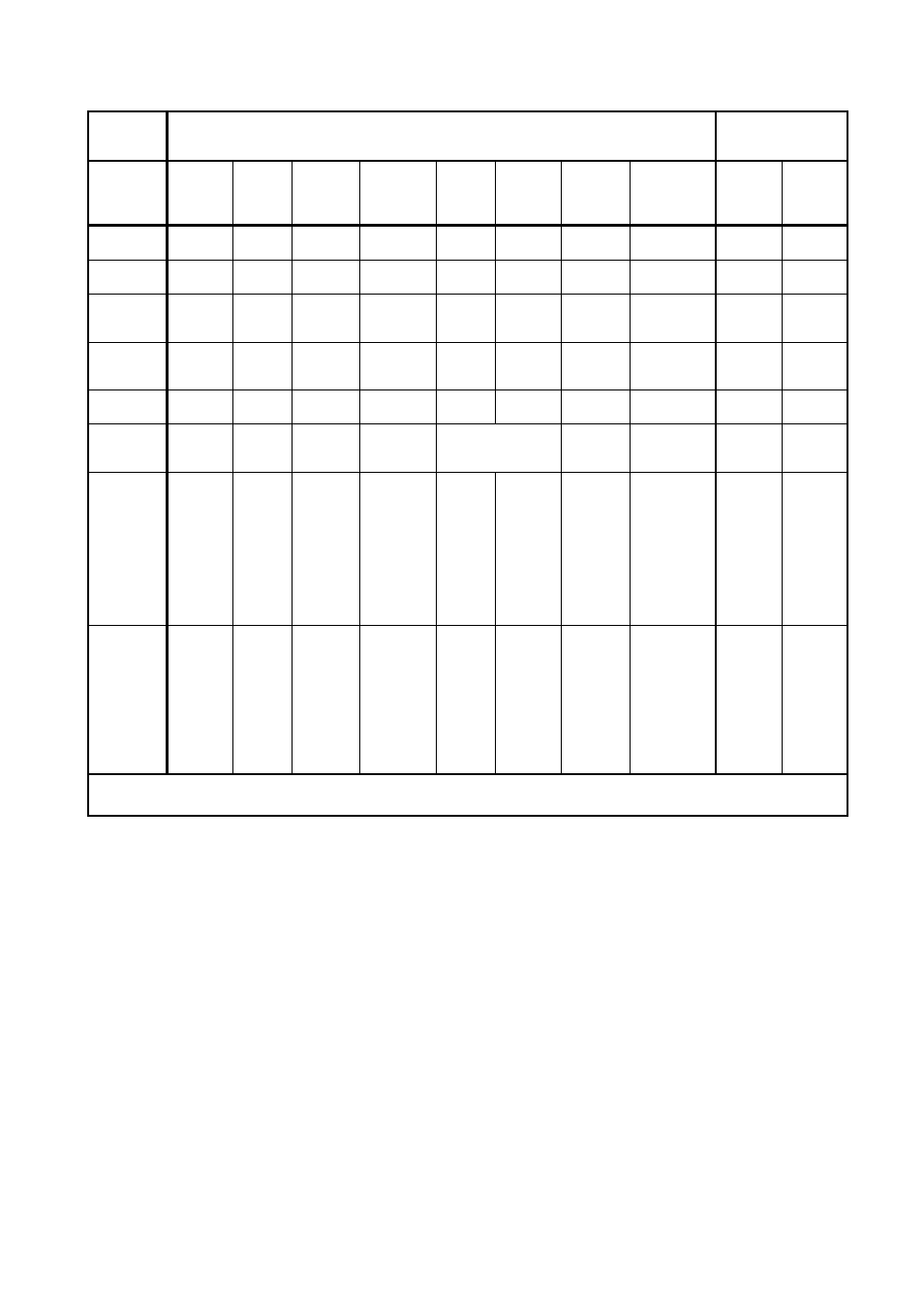
Kind of motor Starting procedures for squirrel-cage standard motors compared (typical values)
Special squirrel-cage
motors
Method of
starting
Direct on
Line
(DOL)
Υ–Δ-
normal
Υ–Δ-closed
transition
Auto-
transformer
Start via
chokes
Start via
resistors
Soft
starters
Frequency
inverters
Υ–Δ-
enhanced
starting
torque
Multi-stage
start
Mains
strong weak weak
weak-medium
medium
medium weak-
medium
weak medium
medium-
strong
Load during
start
full low low
low-medium
low-
medium
low low-medium
low-medium medium
medium-full
Relative
starting
current I
A
/ I
e 1)
4 ... 8
(= I
AD
)
1.3 ... 2.7
(= 1/3 I
AD
)
1.3 ... 2.7
(= 1/3 I
AD
)
1 ... 5
(=0.25…0.65
I
AD
) selectable
2 ... 4
2 ... 4
2 ... 6
1 ... 2
2 ...4
2 ... 8
Relative
starting
torque T
A
/T
e3)
1.5 ... 3
(= T
AD
)
0.5 ... 1
(= 1/3 T
AD
)
0.5 ... 1
(= 1/3 T
AD
)
0.4 ... 2
(=0.25…0.65
T
AD
)
0.4 ... 0.8
0.4 ... 0.8
0.15 … 2
T
A
= k
2
· T
AD
3)
T
A
adjustable
4)
0.7 ... 1.5
0.7 ... 3
Run-up time
(normal)
0.2 ... 5 s
2 ... 15 s
2 ... 15 s
2 ... 20 s
2 ... 20 s
2 ... 20 s
0.5 ... 10 s
0.5 ... 10 s
2 ...10 s
0.2 ... 10 s
Run-up time
(heavy duty
start)
5 ... 30 s
15 ... 60 s
15 ... 60 s
20 ... 60 s
unusual for loaded start
10 ... 60 s
5 ... 60 s
10 ... 40 s
5 ... 30 s
Characteristic
features
High
acceleration
with high
starting
current
Start with
reduced
torque an
current;
current
and
torque
peaks at
switchover
Like normal
Y-Δ,
considerably
reduced
peaks at
switchover
Similar to Υ–
Δ, but without
switchover-
interruption;
selectable
steps
Voltage
and motor
current
(and thus
relative
torque)
increases
with
speed
Voltage and
torque
increase
less with
speed
compared
to chokes
Adjustable
starting
characteris-
tics. Also
controlled
Stop
possible.
High available
torque at low
current.
Adjustable
starting
characteristics.
Like normal
Υ–Δ, but at
higher
levels of
current and
torque.
Starting
currents
and torques
depending
on motor
design.
Application
area
Drives in
areas with
strong
power
supply
which
permit the
high
starting
torque
Drives
which are
only
loaded
after run-
up
Like normal
Υ–Δ, but for
loads with
little inertia
mass and
high
resistance
torque.
Predominantly
English
speaking
countries
Like Υ–Δ-
starters.
Drives
with
resistance
torque
increasing
with
speed.
Cost-
effective for
unloaded
starts. With
resistance
steps more
expensive
and more
flexible.
Starts which
require a
gentle or
adjustable
torque
characteris-
tic (or
reduced
starting
currents).
Usually for
operational
speed
adjustment.
Energy saving
possible.
Drives with
high
available
torque at
start-up..
Usually for
operational
speed
adjustment.
1)
I
A
= Motor starting current, I
e
= Rated operational current of Motor
2)
T
A
= Motor-Starting torque T
e
=Rated operational torque of Motor
3)
k = Voltage reduction factor T
AD
=Motor starting torque at full voltage
4)
Start frequency controlled, torque wide range adjustable
Tab. 3.1-1
Characteristic features of the commonly used starting methods for squirrel-cage induction motors