1 normal star-delta starting, Normal star-delta starting -5 – Rockwell Automation Low-Voltage Switchgear and Controlgear User Manual
Page 81
3.3.1
Normal star-delta starting
Circuit connections and switching-over procedure
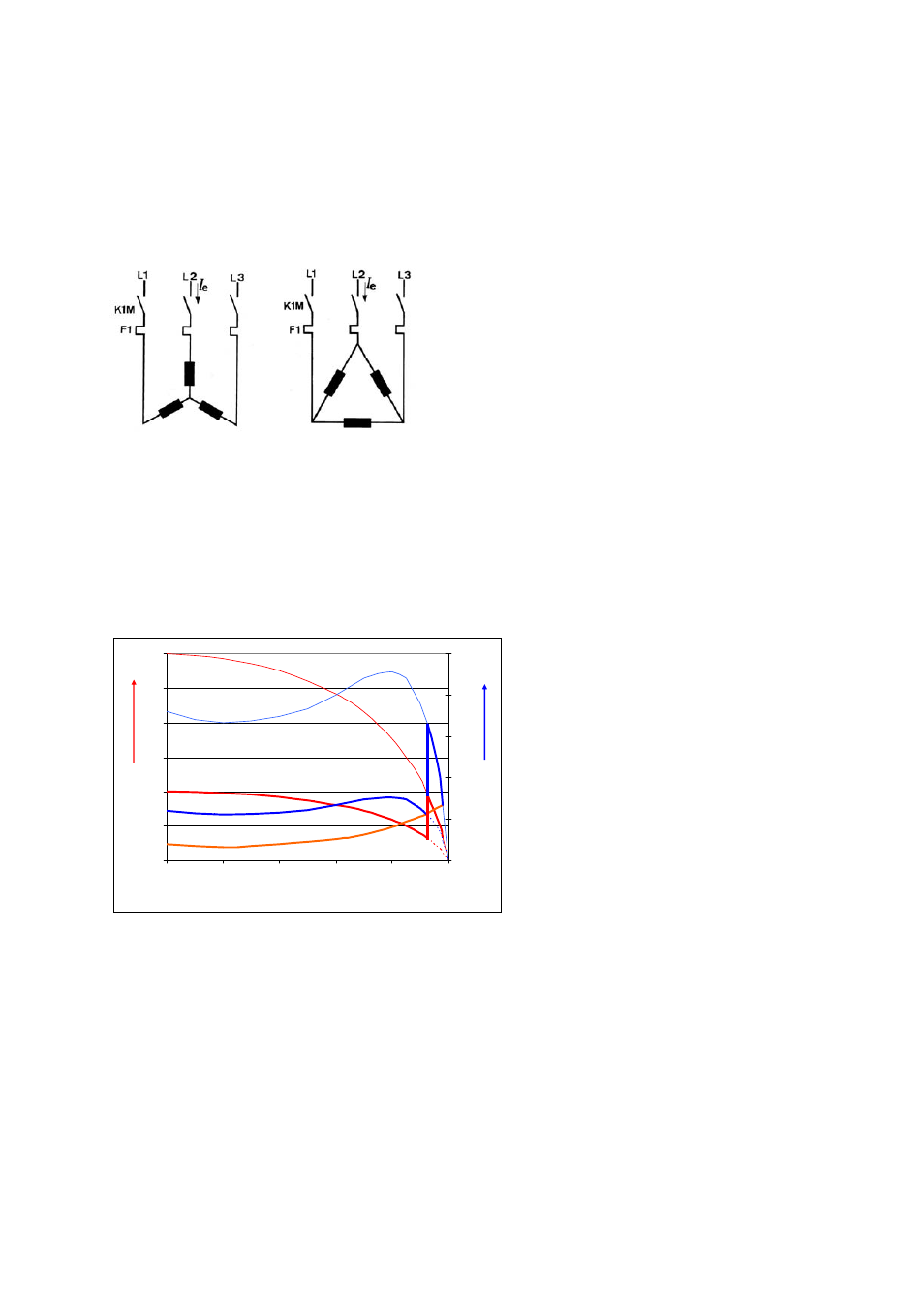
On initiation of starting, the supply voltage is applied to the star-connected motor windings. The
starting torque and the starting current in this circuit are approx. 30 % of the values for delta
connection. Because of the reduced torque in star connection, the motor does not quite reach
the rated speed. After star-connected start-up, the windings are switched-over to delta connec-
tion.
Fig. 3.3-1
When starting in star connection, the phase voltage is applied to the motor windings and a windings
current of I
WY
= I
W
Δ
/
√3 flows.
Because of vectorial addition of the windings currents in delta connection I
eY
= I
e
Δ
/3.
On switching from star to delta operation, there is a current surge, whose magnitude depends
on various factors. In the figures below, typical cases are illustrated.
shows the ideal case for such a switchover. The motor nearly reaches its rated speed
in the first stage, as the load torque during starting is relatively low. The switching-over current
surge is around the same size as the starting current.
0
20
40
60
80
100
n/n
s
[%]
0.00
0.50
1.00
1.50
2.00
2.50
T /T
e
T
Δ
T
Y
Fig. 3.3-2
Typical characteristic of current and torque for star-delta starting
I = motor
current
I
e
=
rated operational current of the motor
I
Υ
=
current in star connection
I
Δ
=
current in delta connection
I
A
=
current characteristic with star-delta starting
T = torque
T
e
=
rated operational torque of the motor
T
Υ
=
torque in star connection
T
Δ
=
torque in delta connection
T
L
= load
torque
n = speed
n
s
= synchronous
speed
LVSAM-WP001A-EN-P - April 2009
3-5