Specifications, Appendix a, Appendix a lists the modul – Rockwell Automation 1756-HYD02 ControlLogix Hydraulic Servo Module User Manual
Page 83: Appendix
Publication 1756-UM525A-EN-P - June 2003
83
Appendix
A
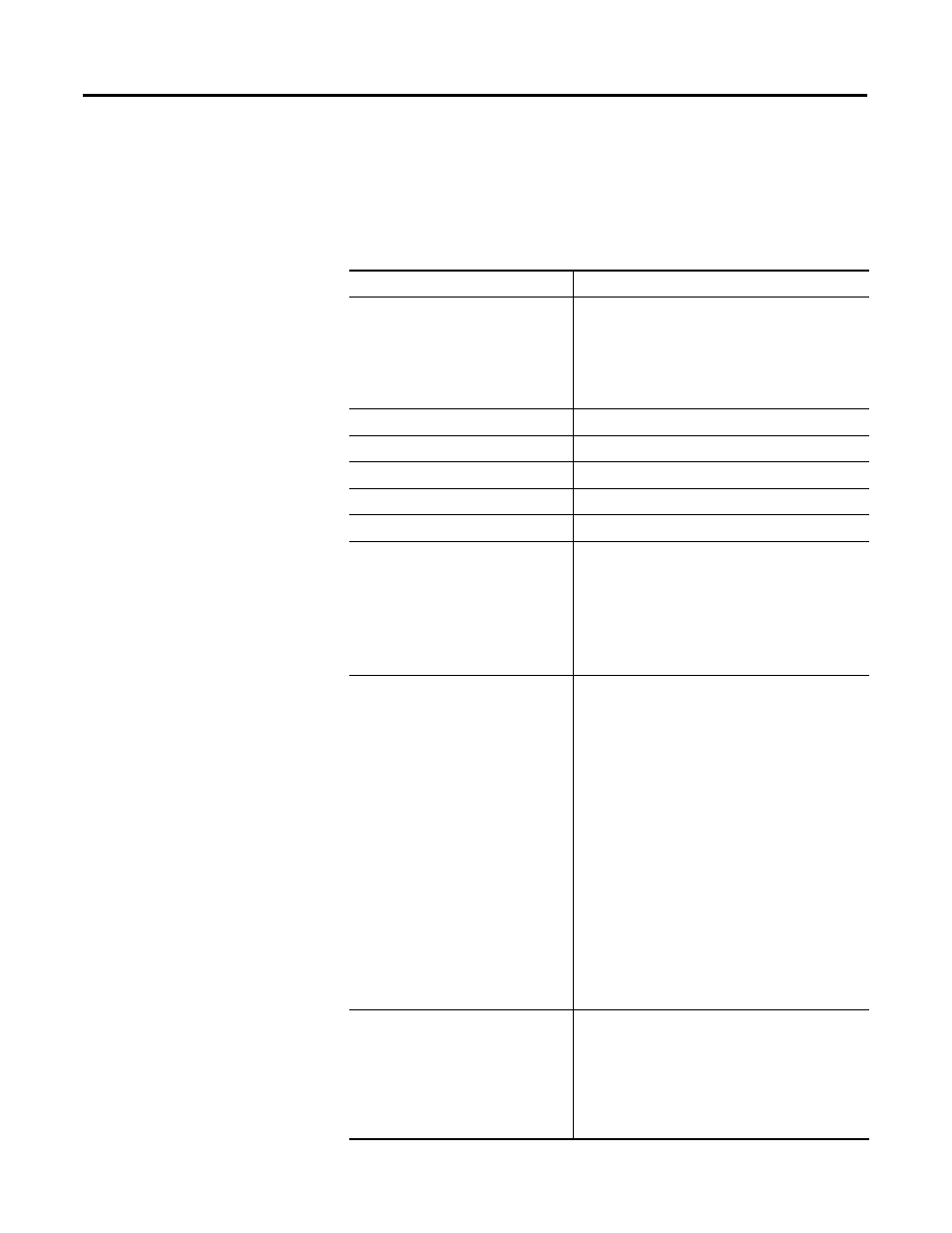
Specifications
Number of axes
2 axes maximum
Servo loop
Type
Gain resolution
Absolute position range
Rate
Proportional, integral and differential (PID) with
Feed-Forwards and Directional scaling
32- bit floating point
230,000 LDT counts
500Hz to 4kHz (Selectable)
Module location
1756 ControlLogix chassis
Module keying
Electronic
Power dissipation
5.5W maximum
Thermal dissipation
18.77 BTU/hr.
Backplane current
5.1V dc @ 700mA and 24V dc @ 2.5mA
LDT input
Type
Sample rate
Resolution
(1)
Electrical interface
Input impedance
Output load
PWM, Start/Stop rising or falling edge
120MHz (8.33ns)
Less than 0.001 inch with single recirculation
Isolated 5V differential (RS-422 signal)
215 Ohm differential
100 Ohm minimum
Registration inputs
Type
24V dc input voltage
Maximum on
Minimum on
Maximum off
5V dc input voltage
Maximum on
Minimum on
Maximum off
Input impedance
24V dc input
5V dc input
Response time (position latched)
Optically isolated, current sinking input
+24V dc nominal
26. 4V dc
18. 5V dc
3.5V dc
+5V dc nominal
5.5V dc
3.7V dc
1.5V dc
1.2 k
Ω
9.5 k
Ω
1 servo update period - Servo update period is the
period at which the position and/or velocity
feedback is sampled and a new servo loop is
closed to generate a new servo output. The time of
this period is a user-defined setting from 250
μ
s to
2000
μ
s.
All other inputs
Type
Input voltage
Maximum on
Minimum on
Maximum off
Input impedance
Optically isolated, current sinking input
+24V dc nominal
26. 4V dc
17. 0V dc
8.5V dc
7.5 k
Ω