Rockwell Automation 1395 DC Drive, 800-1250 Hp, FRN 5.XX-9.30 User Manual
Page 83
Chapter 4
Installation
4-18
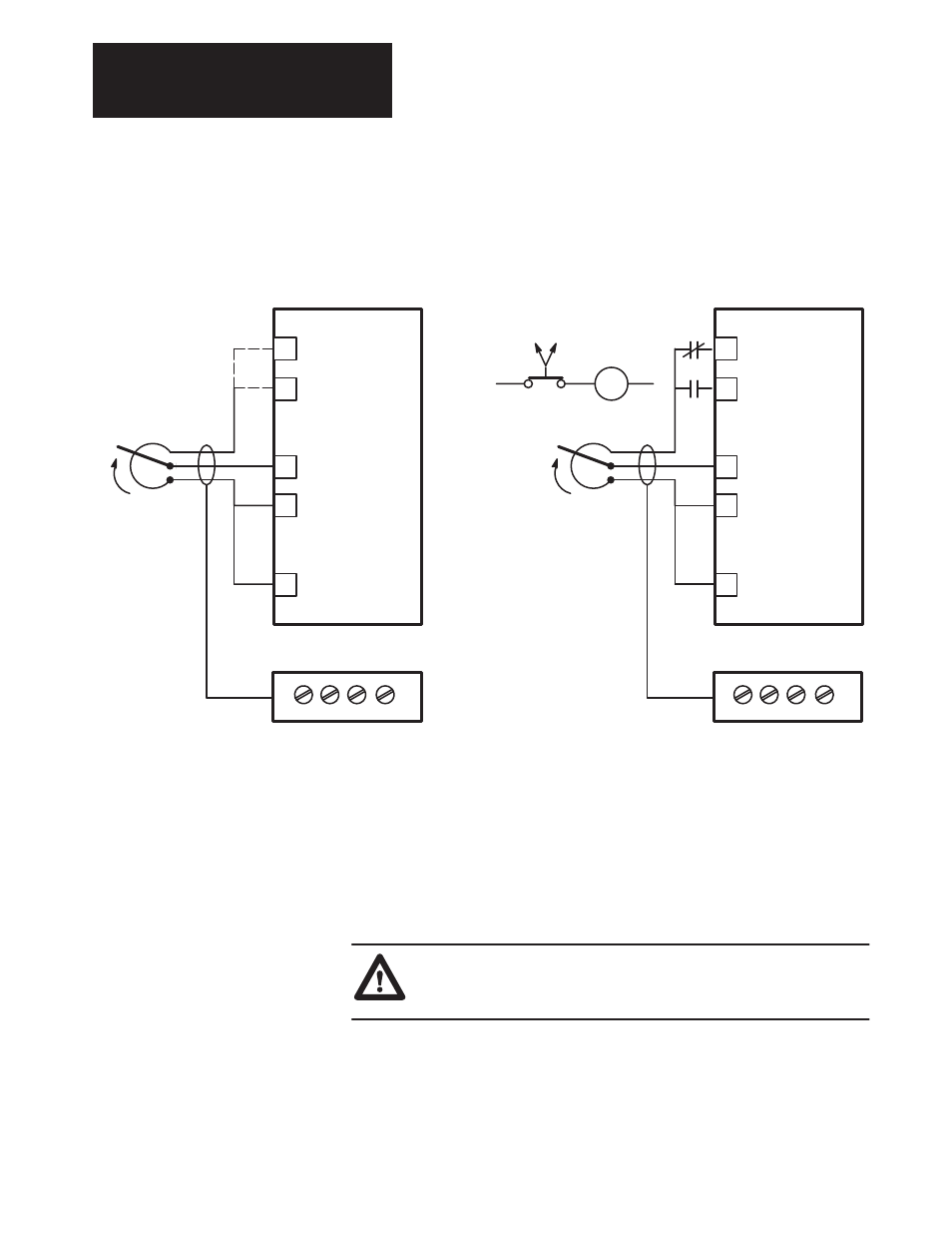
Analog Input – Velocity and Trim Reference. Connections for the
velocity and trim reference inputs can be for uni- or bi-directional
operation, using the internal drive
±
10VDC power supply (see Fig. 4.8).
Figure 4.8
Typical Analog Input Connections
31
32
+
–
33
TB3
+10V DC P.S.
–10V DC P.S.
ANALOG INPUT
P.S. COMMON
Bi-directional Operation
IMPORTANT: Connect
shield to drive end only.
Other end is to be insu-
lated and left floating.
Reference*
2.5k Ohm
Minimum
31
32
+
–
33
TB3
+10V DC P.S.
–10V DC P.S.
ANALOG INPUT
P.S. COMMON
TB10
Uni-directional Operation
IMPORTANT: Connect
to either terminal 31 or
32, Not Both
Reference*
2.5k Ohm
Minimum
R
R
Forward
Reverse
R*
Reverse Relay
* External to the Drive
*
TB10
Tach Velocity – The analog tachometer device generates a DC voltage that
is direction sensitive and proportional to speed. The tach output must be
connected to an analog input channel on the Discrete Adapter Board. Most
industrial tachs have an output greater than the
±
10V range of the analog
inputs. The tach output must be scaled down, by an external voltage
divider network, so that the entire speed range of the motor can be
represented by a
±
9V feedback signal.
ATTENTION: Connecting a tach which has an output range
greater than
±
10V directly to the analog input channel can
severely damage the adapter board.
The tach signal then must be scaled in the adapter board to determine the
proper relationship of output voltage/motor velocity to base speed in Drive
Units. This scaled configuration data must then be linked to Parameter 156
“Tach Velocity”.