Chapter 3 functional description 3-29 – Rockwell Automation 1395 DC Drive, 800-1250 Hp, FRN 5.XX-9.30 User Manual
Page 62
Chapter 3
Functional Description
3-29
5
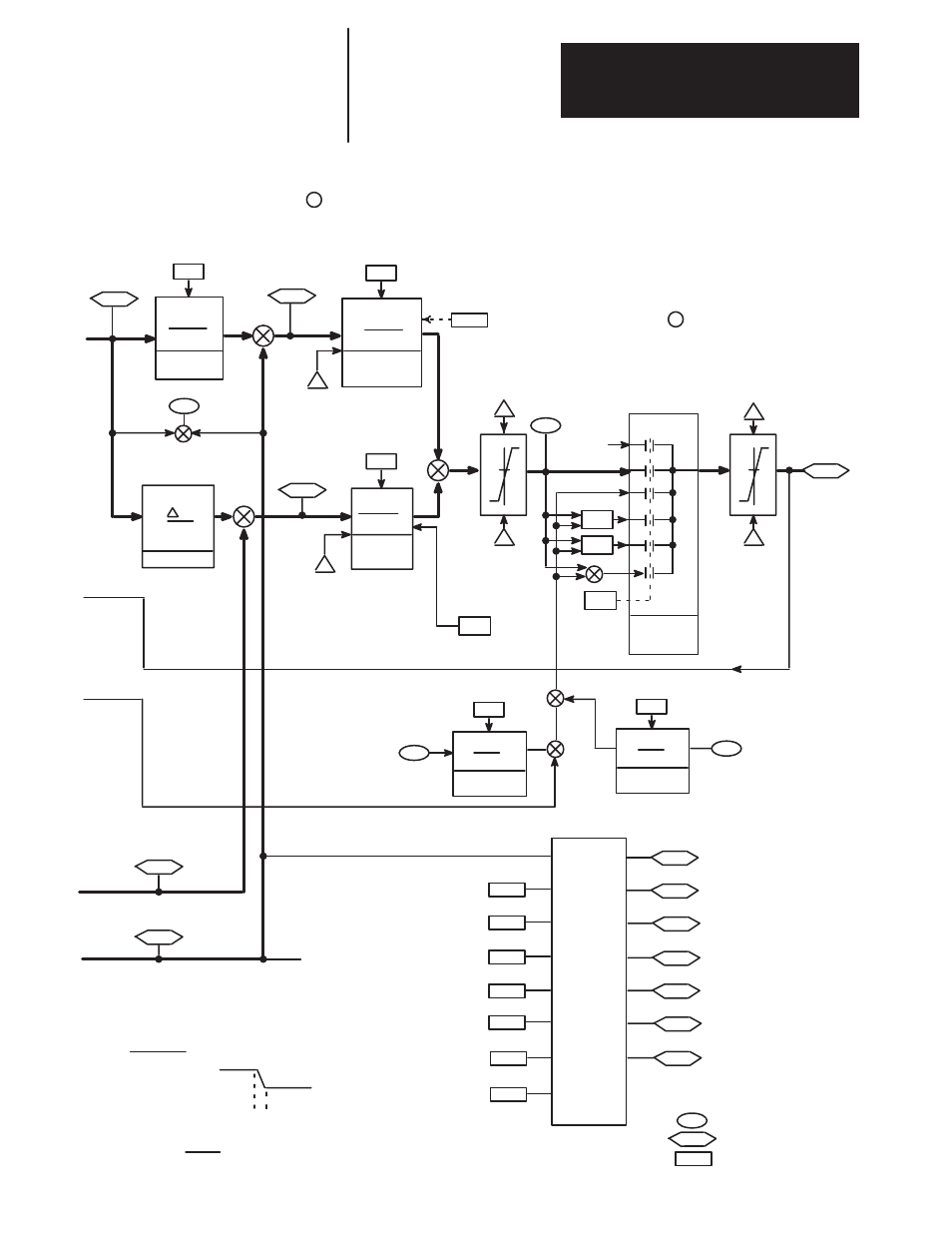
VELOCITY PI CONTROL
INTEGRAL
GAIN
FUNCTION
AUTO TUNE
GAIN
KF VELOCITY
LOOP
661
Final
Vel Ref
104
RPM
H
65536
INTEGRATOR
FEED
FORWARD
KF GAIN
REV TORQUE
LIMIT
From Sht 3
TORQUE
MODE
SELECT
625 VALUE
0
1
2
3
SPEED
DETECTION
SLAVE %
100
SLAVE
PERCENT 2
FEEDBACK FILTER 631
4096 = MOTOR BASE SPEED
+
–
RPM
Velocity
Feed Forward
108
KP VELOCITY
LOOP
660
8
PROPORTIONAL
GAIN
FUNCTION
KP GAIN
TACH
SWITCH KP
690
+
123
0
+
H
C
B
KI GAIN
8.3886
AUTO TUNE
GAIN
KI VELOCITY
LOOP
659
MIN
MAX
+
+
4
5
625
TORQUE
MODE
FWD TORQUE
LIMIT
From Sht 3
B
C
FWD TORQUE
LIMIT
From Sht 3
REV TORQUE
LIMIT
From Sht 3
%
8
TORQUE SELECT
TORQUE
COMMAND
110
4096 = 100%
RATED TORQUE
+
–
T
S
124
+
–
+
+
SLAVE PERCENT 2
670
%
+
+
SLAVE %
100
SLAVE
PERCENT
%
SLAVE PERCENT 1
669
POSITION FDBK
107
VELOCITY FDBK
106
To Sheet 3
RPM
4096 = IPU POSITION
%
11
AT SPEED 1 100
12
AT SPEED 2 100
709 UP TO
SPD TOLERANCE
13
AT SPEED 3 100
14
AT SPEED 4 100
15
AT SPEED 5 100
10
AT ZERO SPEED 100
9
AT SET SPEED 100
710 ZERO
SPD TOLERANCE
704 AT
SPEED 1
705 AT
SPEED 2
706 AT
SPEED 3
707 AT
SPEED 4
708 AT
SPEED 5
If 631 = 1,2
T (S) =
W
1
2
(S+W2)
2
W
2
2
(S+W1)
2
35/49 = W
1
= 35
W
2
= 49
20/40 = W
1
= 20
W
2
= 40
W
1
W
2
If 631 = 3
T (S) =
( GAIN/256) (S + W
N
)
S + W
N
SYMBOL
PARAMETER TYPE
SINK
SOURCE
SET UP
TACH
SWITCH KI
689
%
167
Torque Ref 2
4096 = 100%
157
Torque Ref
4096 = 100%
109
Position
Error