Chapter 3 functional description 3-28 – Rockwell Automation 1395 DC Drive, 800-1250 Hp, FRN 5.XX-9.30 User Manual
Page 61
Chapter 3
Functional Description
3-28
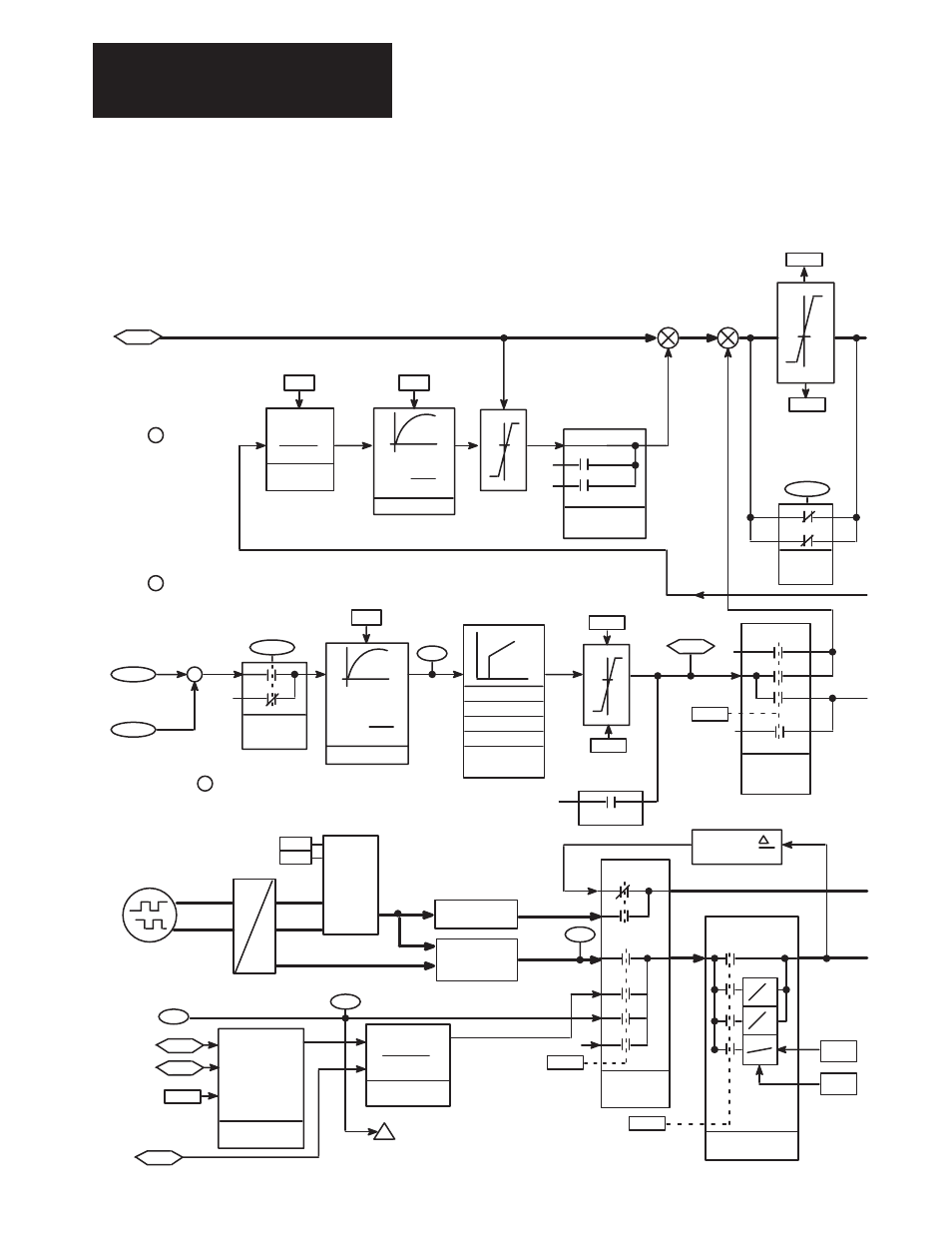
Figure 3.5 (Sheet 2 of 3) 1395 Block Diagram
0
DIGITAL
ENCODER
6
DROOP CONTROL
RPM
RPM
PROC TRIM
HI SUM
4096 = BASE MTR. SPD.
722
721
PROC TRIM
LOW SUM
STOP LOGIC
PROCESS
TRIM
ENABLE
PROC TRIM
HIGH LIM
718
DROOP
DISABLE
657 = 0
LOGIC CMD
150, 151, 152
FEEDBACK
DEVICE
SELECT
FEEDBACK
POSITION
INTEGRATOR
DROOP FILTER
4096 = 100%
658
Ramp
Vel Ref
103
RPM
From
Sheet 1
4096 = Base Motor Speed
15
714–PRELOAD
T(S) =
W
/
S+W
#658 =
A
PROCESS TRIM
REF 161
4096 = 1PU
100
658 = 0
0
FILTER
%
DROOP
GAIN
%
% DROOP
628 Bit 1
PROCESS
TRIM
ENABLE
LOGIC CMD
150, 151, 152
15
7
PROCESS TRIM CONTROL
0
PROCESS TRIM
FDBK 162
4096 = 1PU
+
–
PROCESS TRIM
FILTER
4096 = 100%
713
T(S) =
W
/
S+W
#713 =
FILTER
%
125
PROCESS TRIM
PI CONTROL
PI
715–KI/3277
716–KP/4096
719–OUT K
717
PROC TRIM
LO LIM
0
PROC TRIM
OUTPUT
119
PROCESS
TRIM
SELECT
628 VALUE
0,2
1,3
0
2
0,1
PROC TRIM
SELECT
0
628
4
VELOCITY FEEDBACK CONTROL
621VALUE
T
S
CHAN A
CHAN B
Forward
Pulses
Reverse
Pulses
ENCODER
FEEDBACK
SCALING
RPM
PPR
606
609
EDGE TIME
BASE MOTOR SPEED
ENCODER PPR
0
0
0
1
POSITION
ACCUMULATOR
ENCODER
VELOCITY
CALCULATION
DELTA
θ
ENCODER
θ
ENCODER
VELOCITY
FDBK
122
2
3
FDBK DEVICE
TYPE 621
CEMF
FLUX
FLUX
COMPENSATION
ARMATURE VOLTAGE
VELOCITY FDBK
CEMF
120
FEEDBACK
FILTER SELECT
631 VALUE
VEL FILTER SELECT 631
0
1
2
3
35
49R
20
40R
LEAD
LAG
FILTER
GAIN 692
W
N
693
CEMF FEEDBACK TO
FLUX CONTROL
Sheet 3
RPM
TACH
VELOCITY 156
4096 = Base Motor Speed
VLT
Va
AMP
Ia
ARM VOLTAGE
FDBK 105
ARM CURRENT
FDBK 112
IR
COMPENSATION
Ra +/ –
%
ARM RESISTANCE
614
FLUX COMMAND
115
CEMF =
Va–(IaRa)
%
0
TACHOMETER VELOCITY FEEDBACK
4096 = BASE MOTOR RPM
4096
e
.05W
4096
e
.004W
DROOP PERCENT
657
+
+
+
–