Corner pegging (transmission after heading change) – Kenwood TM-D710GE User Manual
Page 37
33
APRS in Action 05
Corner Pegging (Transmission after Heading Change)
When the mobile station’s speed is above LOW SPEED, Corner Pegging begins operating. A Corner Pegging position
beacon will be transmitted when the heading difference exceeds the TURN THRESHOLD value. The heading difference
is the compass heading of the present direction of travel (in degrees) subtracted from the compass heading transmitted
in the previous position beacon. (Technical note: only the absolute value of the heading difference, normalized to the
first and second quadrants, is used.) The threshold value called TURN THRESHOLD combines a fixed angle threshold,
called TURN ANGLE, with a constant called TURN SLOPE, times ten, divided by the present speed. You can use the
formula below to calculate TURN THRESHOLD.
By changing the value of TURN SLOPE, you can adjust how Corner Pegging responds as the mobile station executes
curves. When the value of TURN SLOPE is increased, a large heading angle change is necessary to cause a position
beacon transmission, especially at low speeds. When the value of TURN SLOPE is reduced, the effect of speed on
Corner Pegging is reduced, as the constant TURN ANGLE becomes the controlling term in the equation. A value for
TURN SLOPE of 110 (in units of 10 degrees per mph) has been experimentally determined to be a good value for
vehicles on typical roads.
Corner Pegging Formula:
TURN THRESHOLD = TURN ANGLE + 10 x TURN SLOPE / SPEED
The above formula is based on the reality of how a mobile station executes turns: when traveling at slow speed, it can
turn acute angles, but when traveling at high speeds, it turns only shallow angles. In other words, TURN THRESHOLD
varies inversely with speed: at a low speed, the threshold becomes large, while at a high speed the threshold becomes
small.
To prevent the Corner Pegging beacon from transmitting too often and causing QRM, there is a timer value called
TURN TIME. The Corner Pegging position beacon is not transmitted until TURN TIME seconds have elapsed since the
previous beacon transmission, regardless of which method (Corner Pegging or Variable Rate Beaconing) caused the
previous beacon.
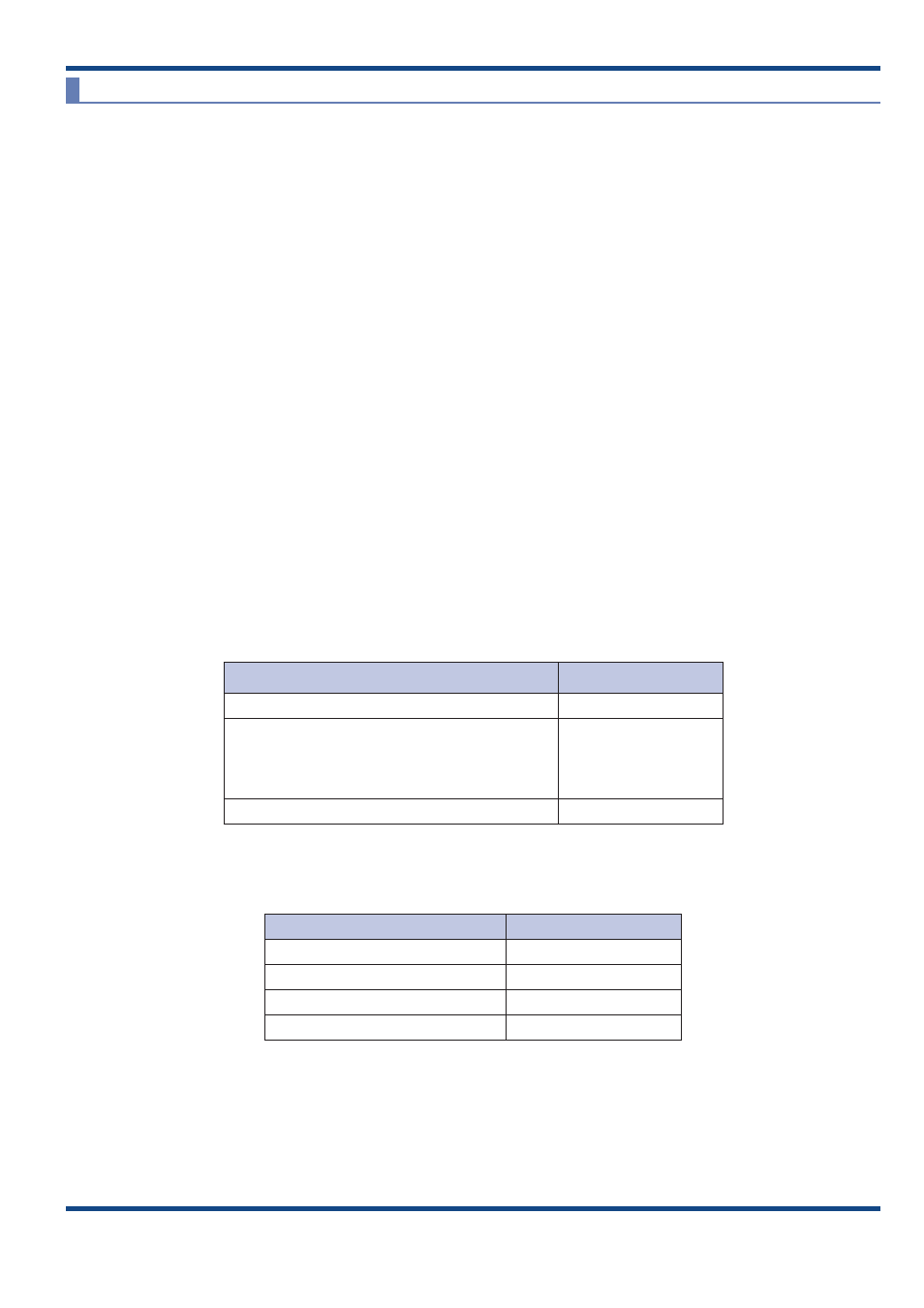
Table 5-4 Conditions for Corner Pegging Operation
Speed
Corner Pegging
Over HIGH SPEED
Yes
Under HIGH SPEED
Over LOW SPEED
(Only when HIGH SPEED ≥ LOW SPEED)
Yes
Under LOW SPEED
No
Table 5-5 Configuration Example
Menu Item
Configured Value
LOW SPEED
5
TURN ANGLE
28 degrees
TURN SLOPE
26 (x10 deg/speed)
TURN TIME
30 seconds