Decay algorithm function, Proportional pathing function, 05 aprs in action – Kenwood TM-D710GE User Manual
Page 34
30
05 APRS in Action
Decay Algorithm Function
The position beacon for a mobile station is usually transmitted at a fixed time interval to provide consistency in vehicle
tracking and station participation. However, when traffic is slow-moving, it would be inefficient use of air-time to continue
transmitting at this fixed interval. Therefore, while parked or moving slowly, the beacon transmission interval gradually
increases by using a decay algorithm. This cleverly reduces air‑time used by the station without reducing the quality of
station information being made available to the system.
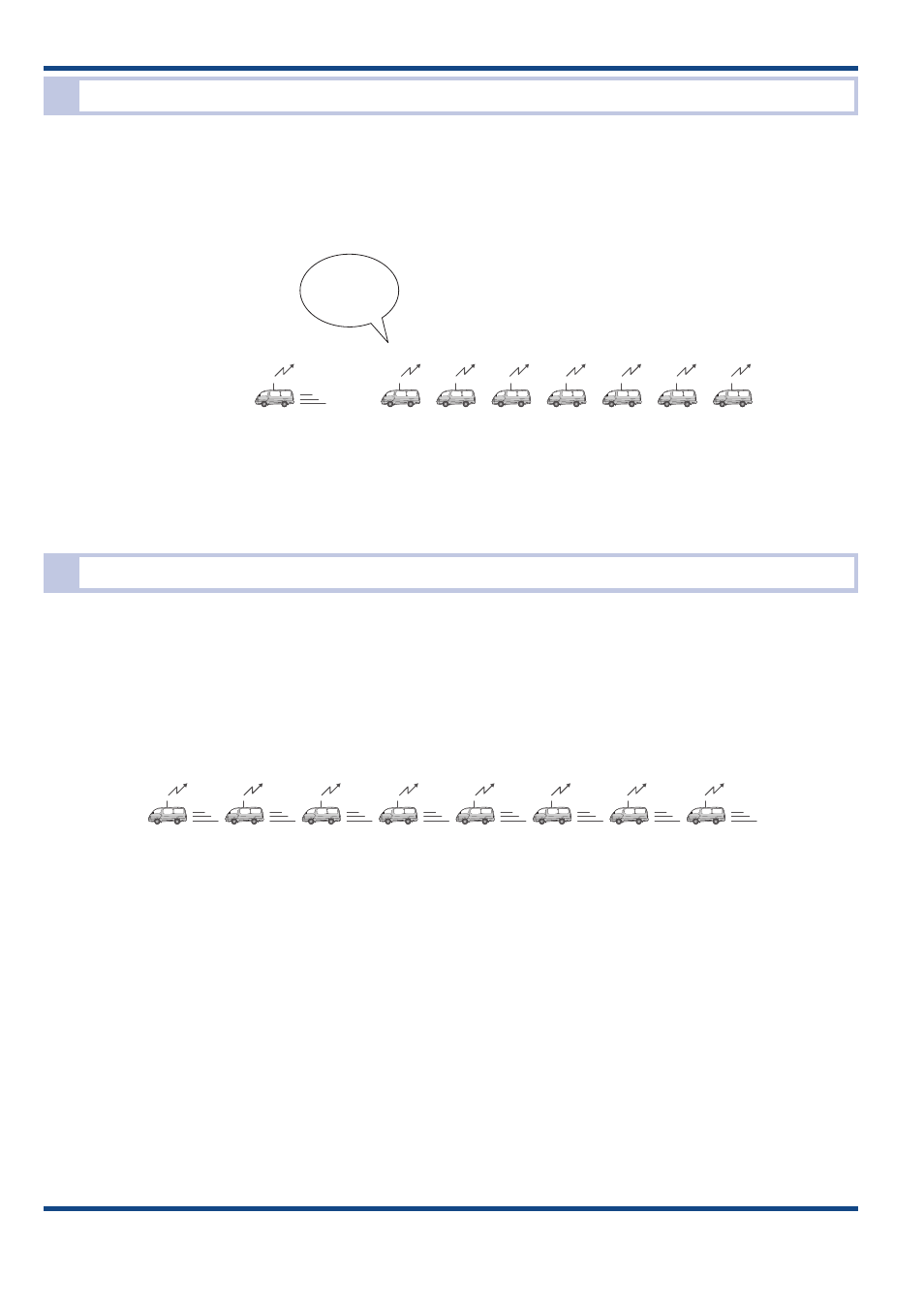
Traffic Jam!
Transmits the
position beacon
2 minutes
1 minute
4 minutes 8 minutes 16 minutes 32 minutes 32 minutes
Fig. 5-1 Decay Algorithm
Decay Algorithm steps the transmission interval of the beacon down from 1 to 2 to 4 to 8 to 16 to 32 minutes when the
mobile station is not moving. The speed at which Decay Algorithm decides that the car is parked can be set using the
Stopped dropdown list in the Page 7 tab of the APRS/ NAVITRA window of the MCP‑2A or in the Basic tab of the
APRS window of the MCP‑6A. If the mobile station’s speed is less than this setting, then Decay Algorithm will start.
Proportional Pathing Function
Proportional pathing recognizes that the value and timeliness of local information is more important close to the sender
and of less importance farther out in the network. To minimize loading on the network from distant stations, the TM‑D710
implements Proportional Pathing to maintain a high update rate for local packets, but divides that rate by two at each
additional hop through the network as shown in the diagram below. If the transmit rate is set to 1 minute, then locally, the
packet will be seen every minute. But this will only be seen every 2 minutes via the local digipeater. It will only be seen
once every 4 minutes via surrounding two hops. This algorithm drastically reduces the APRS network load, while still
providing good tracking to local mobiles.
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
Transmits
every 1 minute
DIRECT
(No hop)
DIRECT
(No hop)
DIRECT
(No hop)
DIRECT
(No hop)
WIDE1-1
(1 hop)
WIDE1-1
(1 hop)
WIDE1-1,WIDE2-1
(2 hops)
WIDE1-1,WIDE2-2
(3 hops)
Fig. 5-2 Proportional Pathing adjusts Number of Relays (when using WIDE1‑1,WIDE2‑2)
To alleviate this problem, Proportional Pathing automatically changes the number of packet relay hops every time
the beacon is transmitted. The effect of this is that nearby stations will receive updates frequently while more distant
stations will receive half as many updates. The speed at which Proportional Pathing decides that the car is moving can
be set using the Moving dropdown list in in the Page 7 tab of the APRS/ NAVITRA window of the MCP‑2A or in the
Basic tab of the APRS window of the MCP‑6A. If the mobile station’s speed exceeds this setting, then Proportional
Pathing will start.