Commissioning, 4 pid parameters – Sterling RT User Manual
Page 35
34
SV01H
Commissioning
4.5.4
PID Parameters
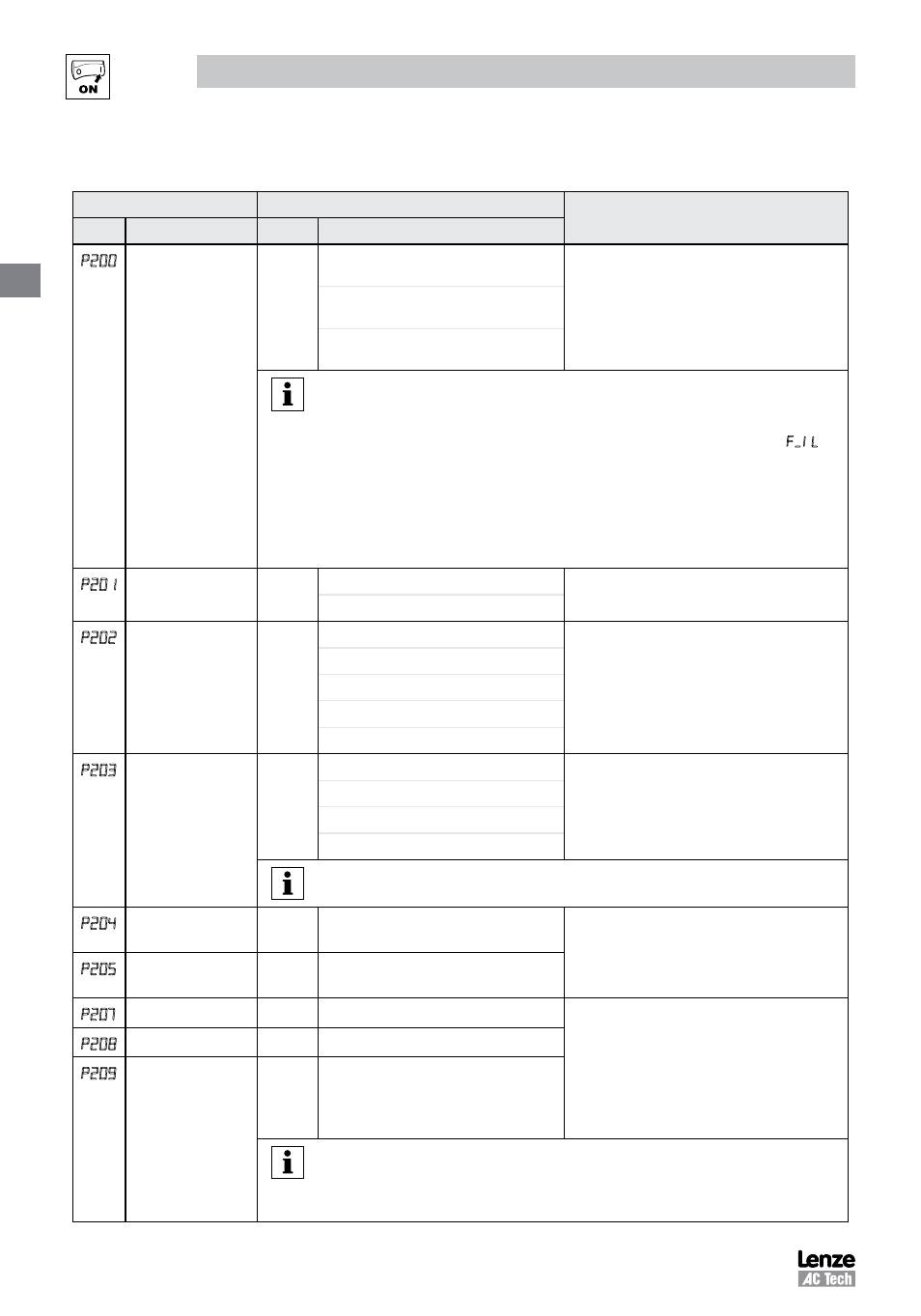
Code
Possible Settings
IMPORTANT
No.
Name
Default Selection
P 0
PID Mode
0
0 Disabled
• Normal-acting: As feedback increases,
motor speed decreases
• Reverse-acting: As feedback increases,
motor speed increases
• PID mode is disabled in Vector Torque mode
(P300 = 5)
1 Normal-acting
2 Reverse-acting
NOTE
To activate PID mode, one of the TB-13 inputs (P121...P124) must be used to select
the Auto Reference that matches the desired PID setpoint reference. If the selected PID
setpoint reference uses the same analog signal as the PID feedback (P201), an I
fault will occur.
Example: The desired PID setpoint reference is the keypad (s and t). Set TB-13x = 6
(Auto Reference: Keypad):
• TB-13x = closed: PID mode is active
• TB-13x = open: PID mode is disabled and the drive speed will be controlled by the
reference selected in P101.
p 1
PID Feedback Source
0
0 4-20 mA (TB-25)
Must be set to match the PID feedback signal
1 0-10 VDC (TB-5)
p 2
PID Decimal Point
1
0 PID Display = XXXX
Applies to P204, P205, P214, P215, P231...
P233, P242, P522, P523
1 PID Display = XXX.X
2 PID Display = XX.XX
3 PID Display = X.XXX
4 PID Display = .XXXX
PID Units
0
0 %
Select the UNITS LED that will be illuminated
when the drive is running in PID control mode
1 /UNITS
2 AMPS
3 NONE
NOTE:
P203 is applicable to SMV 15HP (11kW) and greater models only.
p 4
Feedback at
Minimum Signal
0.0
-99.9
3100.0
Set to match the range of the feedback signal
being used
Example: Feedback signal is 0 - 300 PSI;
P204 = 0.0, P205 = 300.0
p
Feedback at
Maximum Signal
100.0 -99.9
3100.0
7
Proportional Gain
5.0
0.0
{%}
100.0
Used to tune the PID loop:
• Increase P207 until system becomes
unstable, then decrease P207 by 10-15%
• Next, increase P208 until feedback matches
setpoint
• If required, increase P209 to compensate
for sudden changes in feedback
Integral Gain
0.0
0.0
{s}
20.0
p
Derivative Gain
0.0
0.0
{s}
20.0
NOTE
• Derivative Gain is very sensitive to noise on the feedback signal and must be used
with care
• Derivative Gain is not normally required in pump and fan applications