6 i/o control timing charts, 6-1 when turning the power on, I/o interf ace – Yamaha SRCP User Manual
Page 42
3-
14
3
I/O INTERF
ACE
3-6 I/O Control Timing Charts
3-6
I/O Control Timing Charts
The following shows typical timing charts for I/O control. Refer to these diagrams when creating a
sequence program.
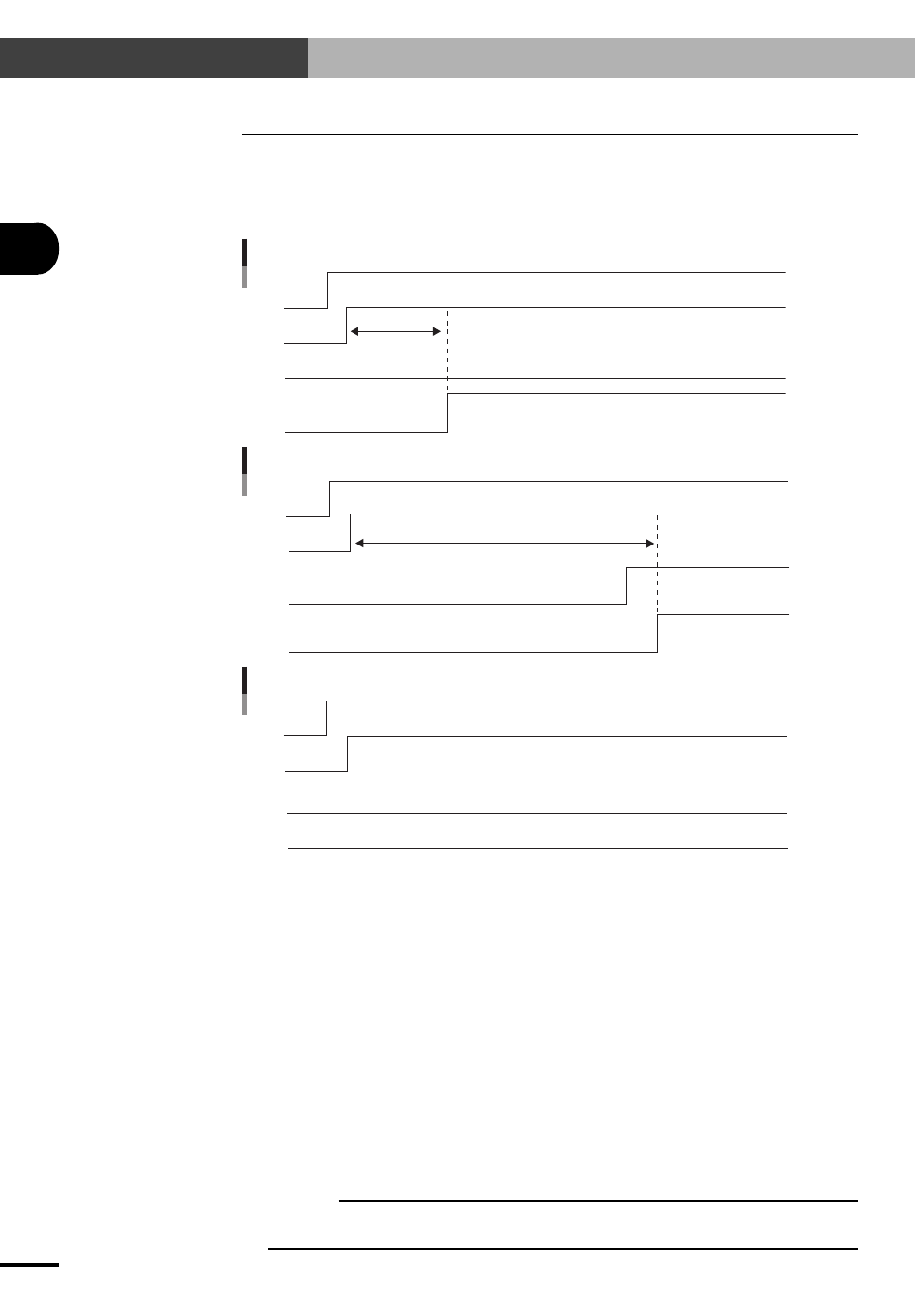
3-6-1 When turning the power on
When emergency stop is triggered:
AC power supply
READY
END
300ms or more
DC24V
power supply
When emergency stop is canceled:
500ms or more
AC power supply
READY
END
DC24V
power supply
When an alarm is issued:
AC power supply
DC24V
power supply
READY
END
■ The SRCP initial state depends on whether emergency stop is triggered when the power is
turned on.
When the power is turned on while emergency stop is cancelled, the SRCP controller starts
with the READY signal and also the servo turned on. (Robot is ready to operate in this state.)
In contrast, when the power is on while emergency stop is triggered, the SRCP controller starts
with the READY signal turned off under emergency stop conditions. (Robot operation is pro-
hibited in this state.)
To enable robot operation, cancel the emergency stop to turn on the READY signal, and then
input a servo recovery command (SERVO).
■ After turning the power on, make sure that the END signal is on before inputting a dedicated
command.
■ If the READY and END signals are still off for more than the specified time after turning the
power on, this means that an alarm has occurred. If that happens, correct the problem while
referring to "13-2 Alarm and Countermeasures".
■ Before supplying AC power to the power supply terminal block, DC 24V power to EXT. CN
must be supplied.
c
CAUTION
DC 24V power to EXT. CN must first be supplied before supplying AC power to the power supply terminal block.
If this order is reversed, an alarm (06: 24V POWER OFF) might be issued.