4 communication command list, Communica tion with pc – Yamaha SRCP User Manual
Page 181
11-
5
11
COMMUNICA
TION WITH PC
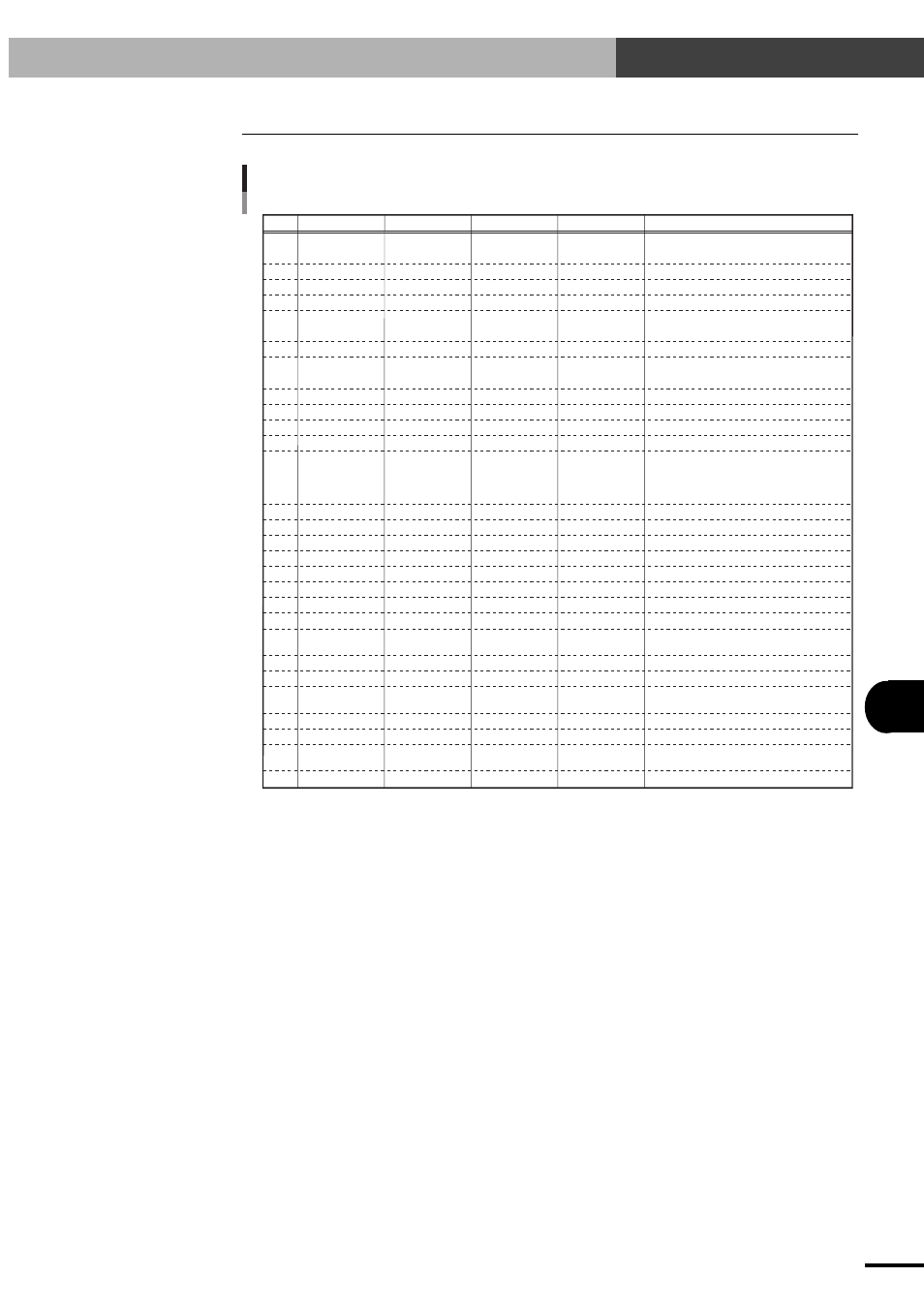
11-4 Communication Command List
11-4 Communication Command List
No.
Operation code
Operand 1
Operand 2
Operand 3
Command details
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
ORG
ORGN
RESET
RUN
SRUN
SRVO
X+/X-
XINC/
XDEC
MOVD
MOVA
MOVI
MOVF
DO
WAIT
TIMR
P
P+
P-
MOVM
MAT
MSEL
CSEL
C
C+
C-
D
D+
D-
SHFT
0
1
X-axis position (mm)
point number
point number
point number
output number
input number
time
point number
pallet work position
number of rows
pallet number
array element
number
counter value
[addition value]
[subtraction value]
counter value
[addition value]
[subtraction value]
point number
speed
speed
speed
DI number
0
1
0 or 1
speed
number of columns
0 or 1
pallet number
Returns to origin
Resets program
Starts automatic operation
Starts step operation
Turns servo off
Turns servo on
Performs jog movement (inching) along X-axis
Performs jog movement along X-axis
Directly moves to specified position
Moves to specified position
Moves specified movement amount
Moves in response to general-purpose input
Turns off general-purpose output or
memory output
Turns on general-purpose output or
memory output
Waits general-purpose input or memory input
Waits for specified time
Defines point variable P
Adds 1 to point variable P
Subtracts 1 from point variable P
Moves to specified pallet work position
Defines matrix on specified pallet
Specifies pallet number where to move
Specifies array element of counter array
variable C
Defines counter array variable C
Adds specified value to counter array variable C
Subtracts specified value from counter
array variable C
Defines counter variable D
Adds specified value to counter variable D
Subtracts specified value from counter
variable D
Performs point data shift
1. Robot movement