4 system configuration, 4-1 system configuration, Over view – Yamaha SRCP User Manual
Page 16
1-
8
1
OVER
VIEW
1-4 System Configuration
1-4
System Configuration
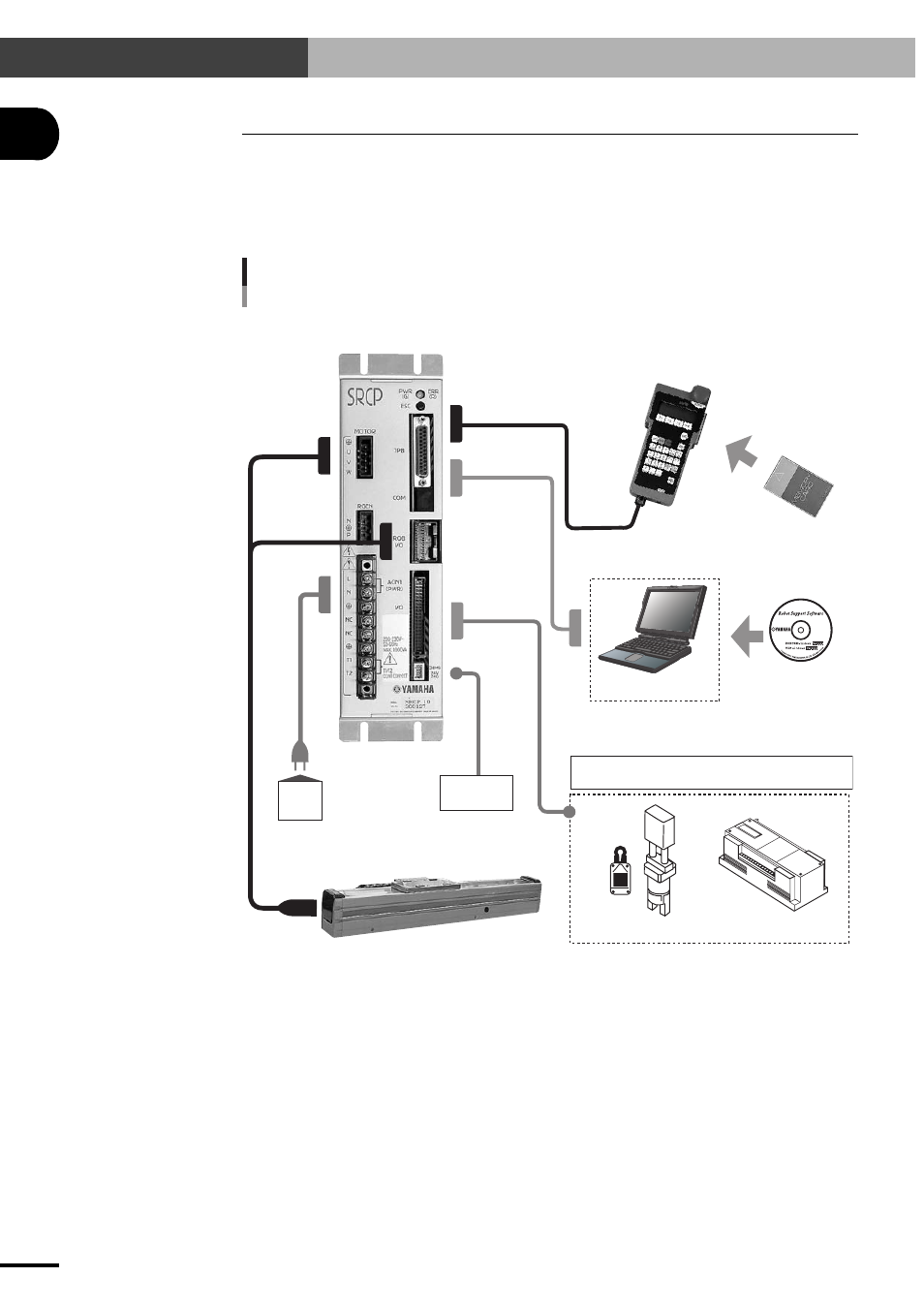
1-4-1 System configuration
The SRCP controller can be combined with various peripheral units and optional products to configure
a robot system as shown below.
* Programming box TPB and support software POPCOM are sold separately.
SRCP Controller
RS-232C
communication
control
or
TPB programming box
IC memory card
Power
supply
General-purpose input: 8 points, dedicated input: 8 points
General-purpose output: 5 points, dedicated output: 3 points
Support software
POPCOM
Single-axis robot (PHASER series)
Gripper, limit switches, etc.
External control
(PLC and similar units)
I/O control
Personal computer
24VDC for
I/O devices
Fig.1-5 System configuration diagram