2-2 variables, Robot language – Yamaha SRCP User Manual
Page 102
8-
4
8
ROBOT LANGUAGE
8-2 Robot Language Syntax Rules
8-2-2 Variables
Variable are used in a program to hold data. The following variables can be used with the SRCP
controller.
■ Point variable P
A point variable can contain a point number. It is used in movement commands such as MOVA
and MOVI statements instead of specifying the point number directly. Sometimes the number of
program steps can be reduced by using point variables.
■ Counter array variable C, Counter variable D
A counter variable can contain counter values and is used to specify the pallet work position
number in a palletizing program and to count the number of runs. A counter array variable is an
array of a total of 32 counter variables that can be selected by the CSEL statement of robot lan-
guage.
■ Flag variable: memory input/output 100 to 147
A flag variable can only have a data value of 1 (ON) or 0 (OFF). It is used in a multi-task program
to synchronize between tasks or in a condition judgement program.
Memory I/O from 100 to 131 can be freely turned on or off by the user or their values can be
referenced. However, outputs 132 to 147 are controlled by the system so the user can only refer to
their values.
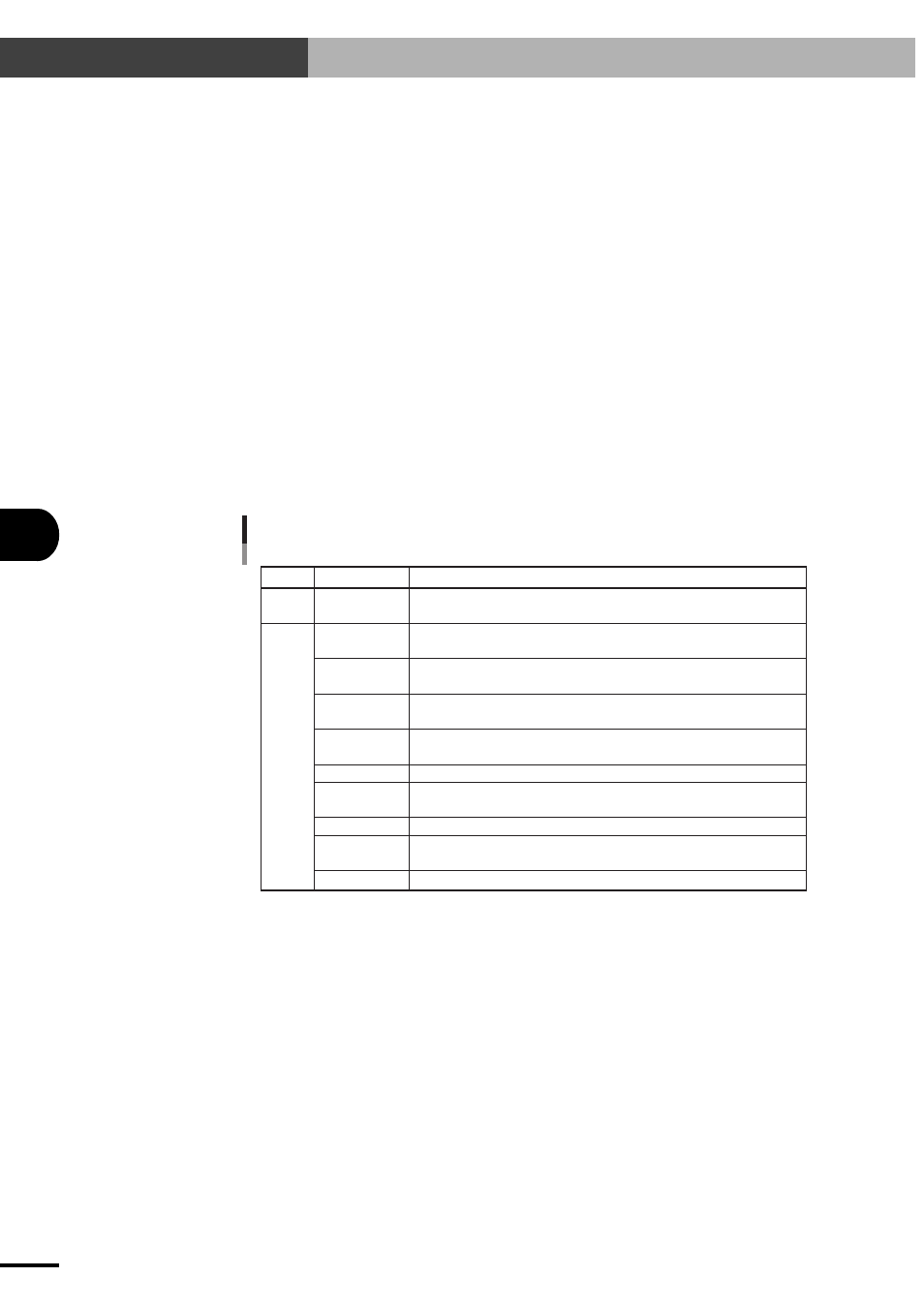
Memory I/O description
Type
General-
purpose
Dedicated
Meaning
Memory I/O available to the user
The user can freely set this with a DO statement.
Task 0 (main task) status
Always set to 1.
Task 1 status
1: Task has started. 0: Task has ended or has not yet started.
Task 2 status
1: Task has started. 0: Task has ended or has not yet started.
Task 3 status
1: Task has started. 0: Task has ended or has not yet started.
Reserved for system use (Always set to 0.)
X-axis hold status
1: Hold 0: Non hold
Reserved for system use (Always set to 0.)
X-axis constant movement status
1: Constantly moving 0: Accelerating, decelerating or in stop
Reserved for system use (Always set to 0.)
Memory I/O No.
100 to 131
132
133
134
135
136 to 139
140
141 to 143
144
145 to 147