3 communication command specifications, Communica tion with pc – Yamaha SRCP User Manual
Page 180
11-
4
11
COMMUNICA
TION WITH PC
11-3 Communication Command Specifications
11-3 Communication Command Specifications
On the SRCP controller, a command interface resembling the BASIC programming language is pro-
vided as standard, to facilitate easy communication with a PC. Communication commands are di-
vided into the following four categories:
1. Robot movements
2. Data handling
3. Utilities
4. Special codes
Format: (except for special codes)
@
■ Basically, all of the commands begin with the start code '@' (=40H) and end with the code c/r
(=0DH) l/f (=0AH). These two codes signal the controller that the statements between them
constitute one command line. (The special codes are the only ones that do not require a start or
an end code.)
■ A communication command is basically composed of an operation code and an operand. De-
pending on the command statement, either no operand is used, or up to three operands are
used.
Items in [ ] (brackets) can be omitted.
■ The character codes used in the SRCP series, are the JIS8 unit system codes (ASCII codes with
katakana characters added). Input characters can be upper case or lower case.
■ One or more space must be inserted between the operation code and the operand.
■ Items with the < > marks should be specified by the user. Check the description of each
communication command and enter the appropriate data. (Refer to "11-5 Communication
Command Description".)
■ When two or more operands are entered, insert a comma (,) between them.
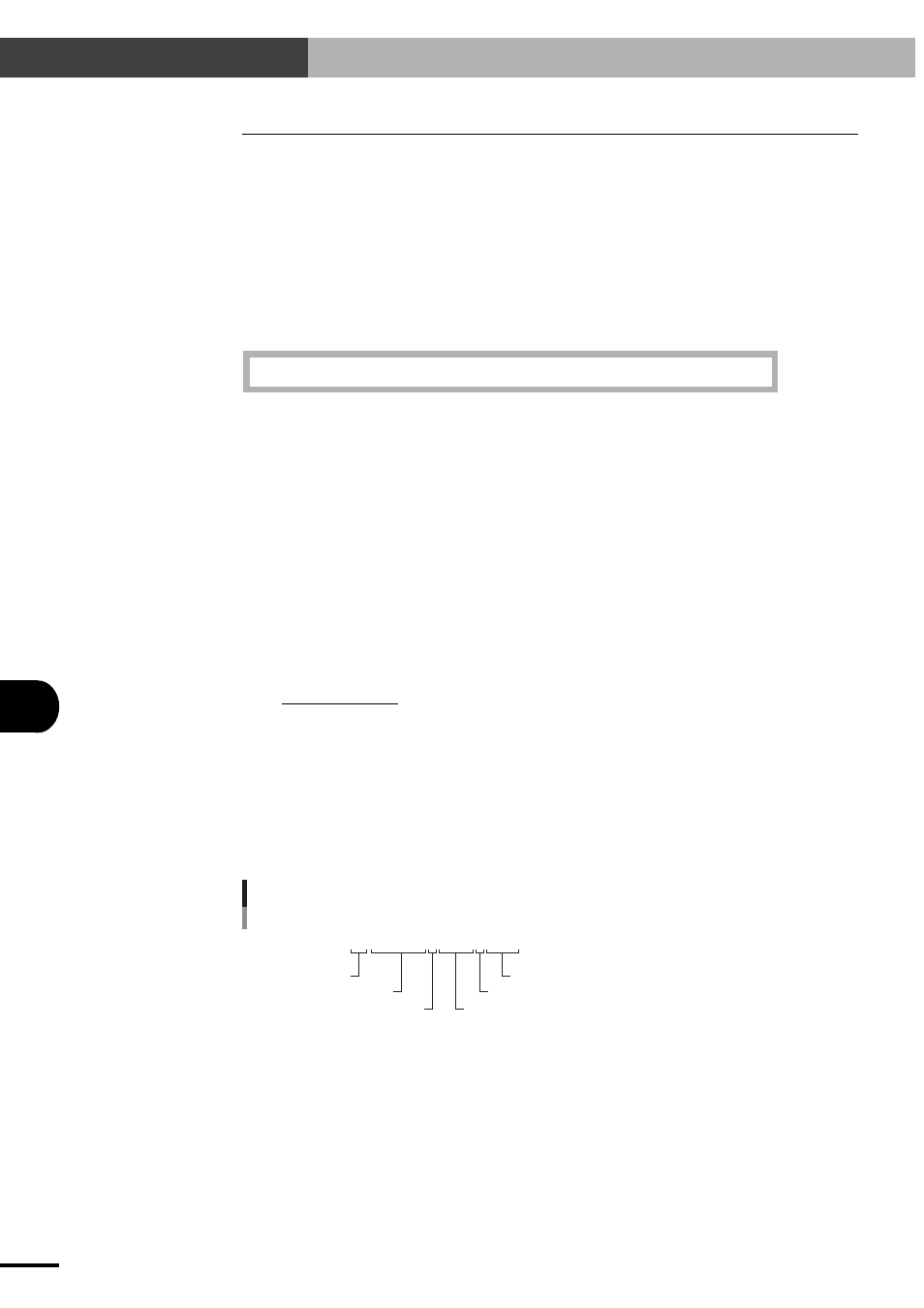
An example is shown below.
@ M O V I 1 2 3 , 1 0 0 c / r l / f
Start code
Operand 2
Opcode (Operation code)
Comma
Space
Operand 1
Transmission example