Robot language – Yamaha SRCP User Manual
Page 130
8-
32
8
ROBOT LANGUAGE
8-5 Sample Programs
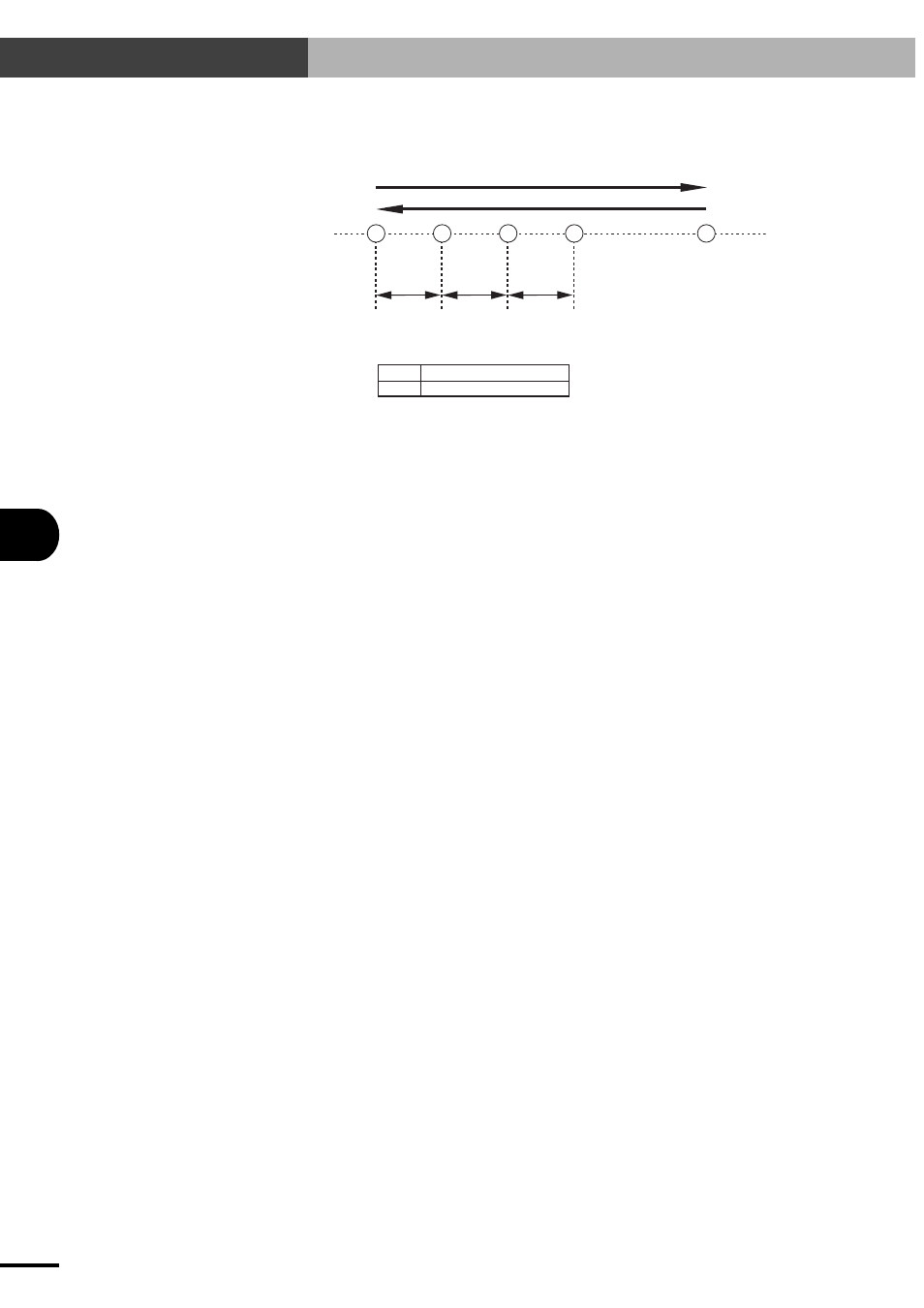
8-5-8 Turning ON general-purpose outputs during robot
movement after a certain time has elapsed
Point
P0 Start
position
P1 Target
position
3 sec.
3 sec.
3 sec.
P0
P1
DO0=1 DO1=1 DO2=1
Program
Comment
[NO0]
001: L
0
; Label definition
002: MOVA
0,
100
; Moves to P0 at speed 100
003: DO
0,
0
; Turns DO0 off
004: DO
1,
0
; Turns DO1 off
005: DO
2,
0
; Turns DO2 off
006: TON
1,
1,
0
; Starts program NO1 as task 1
007: MOVA
1,
10
; Moves to P1 at speed 10
008: JMP
0,
0
; Returns to L0
Program
Comment
[NO1]
001: TIMR
300
; Delays for 3 seconds
002: DO
0,
1
; Turns DO0 on
003: TIMR
300
; Delays for 3 seconds
004: DO
1,
1
; Turns DO1 on
005: TIMR
300
; Delays for 3 seconds
006: DO
2,
1
; Turns DO2 on
See also other documents in the category Yamaha Hardware:
- AW4416 (280 pages)
- MY16-TD (6 pages)
- MY8-TD (8 pages)
- CRW2100SX (48 pages)
- MY8-AE (8 pages)
- DSP1D (4 pages)
- Floppy Disks A4000 (24 pages)
- ERCX (52 pages)
- MB2000 (2 pages)
- T60D (79 pages)
- LMY2-ML (2 pages)
- Floppy Disks A5000 (24 pages)
- mLAN Driver (16 pages)
- CD-R/RW Drive CRW6416SX (42 pages)
- CD Recordable/Rewritable Drive CRW-70 (61 pages)
- CDRW16G (8 pages)
- NAI48-ES (12 pages)
- V629930 (1 page)
- CRW3200SX (46 pages)
- MY16-CII (21 pages)
- EtherSound MY16-ES64 (8 pages)
- MY8-AEB (12 pages)
- CD Recordable/Rewritable Drive CRW-F1UX (50 pages)
- DB-SREV1 (4 pages)
- MY8-SDI-D (17 pages)
- MY16-MD64 (8 pages)
- SW1000XG-E (48 pages)
- mLAN MY16 (24 pages)
- USB-MIDI INTERFACE UX16 (31 pages)
- MY8-ADDA96 (8 pages)
- CRW2200UX (45 pages)
- CRW2200IX (48 pages)
- USB Audio Driver (9 pages)
- CRW8824IX Series (44 pages)
- CD Recordable/Rewritable Drive CRW-F1SX (52 pages)
- mLAN System (13 pages)
- CRW8424E (46 pages)
- MY16-AE EU (6 pages)