Robot language – Yamaha SRCP User Manual
Page 125
8-
27
8
ROBOT LANGUAGE
8-5 Sample Programs
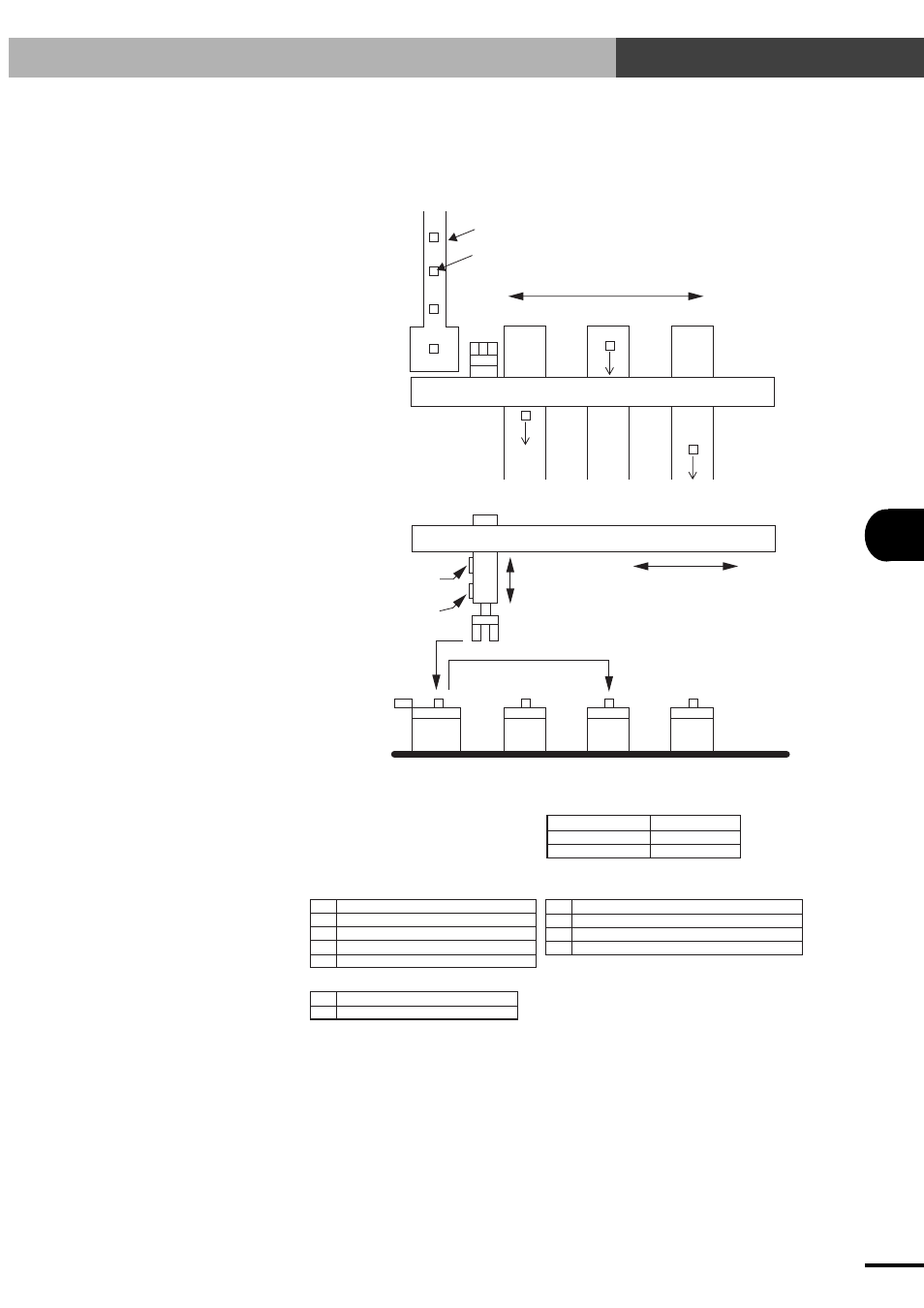
8-5-5 Picking up 3 kinds of workpieces flowing on the front
conveyor and placing them on the next conveyors while
sorting
Horizontal direction
Vertical direction
Hold
AC servo motor
Air cylinder
Air chuck
Actuator
DI0
DI1
DI2
DI3
DI4
Upper end limit switch 1: ON
0: OFF
Lower end limit switch 1: ON
0: OFF
Workpiece A detection sensor 1: Detected 0: No
Workpiece B detection sensor 1: Detected 0: No
Workpiece C detection sensor 1: Detected 0: No
General-purpose input
DO0
DO1
Air cylinder 1: Down
0: Up
Air chuck
1: Close
0: Open
General-purpose output
P0
P1
P2
P3
Workpiece feed position on the front conveyor
Workpiece A mount position on next conveyor
Workpiece B mount position on next conveyor
Workpiece C mount position on next conveyor
Point
Operation
q Moves to the workpiece feed
position and picks up a workpiece.
w Moves to the workpiece mount
position and places the workpiece.
P0
P1
P2
P3
q
w
AC servo
Air cylinder
(DO0)
Air chuck
(DO1)
Upper end limit
switch (DI0)
Lower end limit
switch (DI1)
Workpiece detection
sensor (DI2 to DI4)
Front conveyor
Workpiece
Next conveyors
1st
2nd
3rd
[TOP VIEW]
[SIDE VIEW]
Next single-axis robot