4-1 safety settings for service mode, Other opera tions – Yamaha SRCP User Manual
Page 153
10-
7
10
OTHER OPERA
TIONS
10-4 SERVICE mode function
10-4-1 Safety settings for SERVICE mode
Safety controls that work in "SERVICE mode state" are explained in detail below.
■ Limiting command input from any device other than TPB
When the operator is working within the robot safety enclosure using the TPB, permitting any
command input from devices (such as via I/O) other than the TPB is very hazardous to the TPB
operator.
(For example, a hazardous situation may occur if someone outside the safety enclosure runs an
automatic operation start command (AUTO-R) without letting the TPB operator know about it.)
To avoid this kind of hazard, the TPB can only be used to operate the robot in "SERVICE mode
state", and all other device command inputs are disabled.
However, this limitation can be cancelled even in "SERVICE mode state" under the user's respon-
sibility.
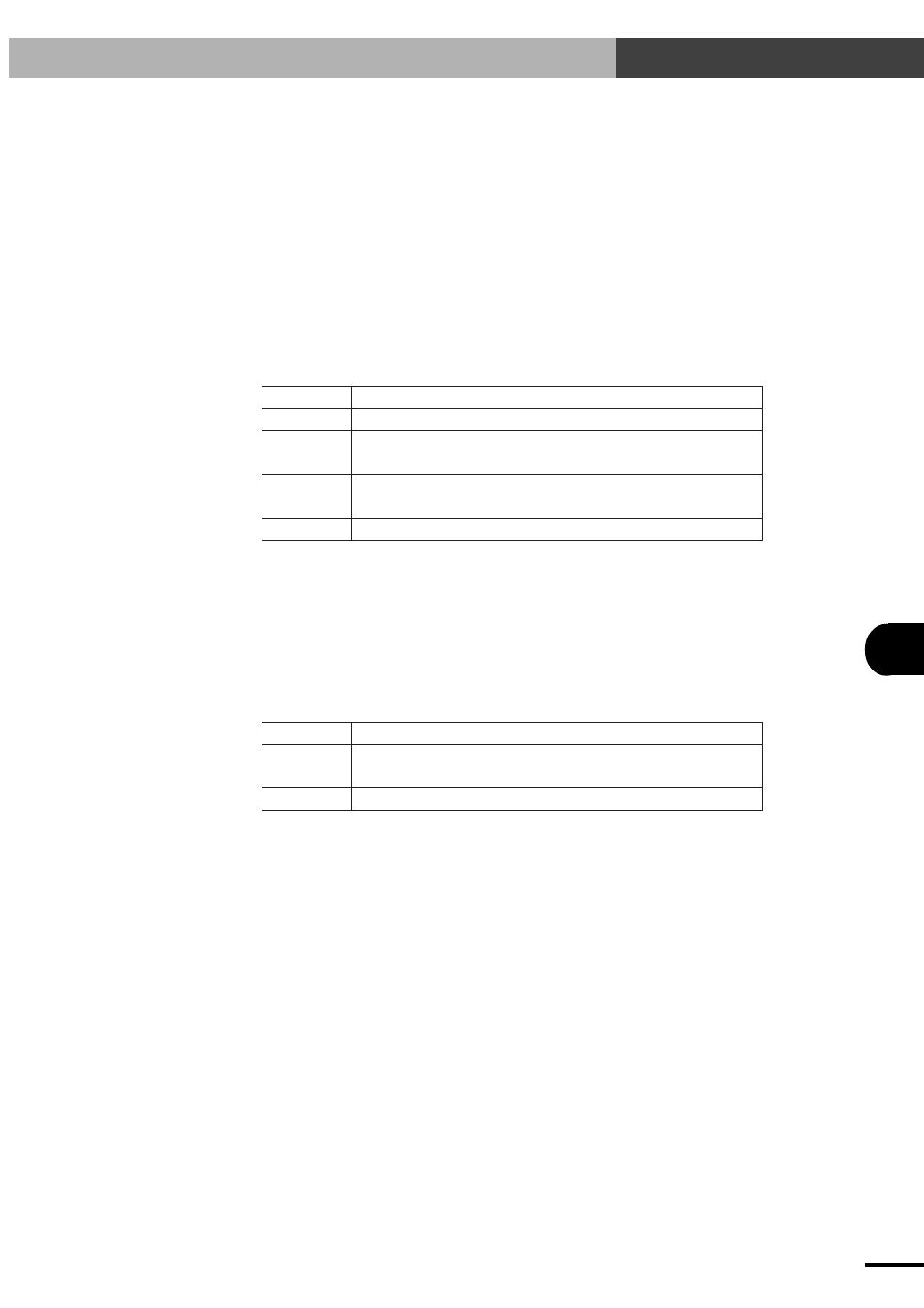
Setting value
0
1
2
3
Details
Only commands input from the TPB are permitted in SERVICE mode state.
Only commands input from the TPB and parallel I/O are permitted in SERVICE
mode state.
Only commands input from the TPB and option unit are permitted in SERVICE
mode state.
Command inputs are not limited even in SERVICE mode state.
■ Limiting the robot movement speed
Moving the robot at a high speed while an operator is working within the robot safety enclosure is
very dangerous to that operator. Setting the robot movement speed to a safety speed of 250mm/s
or less is advisable because most robot operation while the operator is working within the safety
enclosure is for maintaining or adjusting the robot. In view of this, the robot movement speed in
"SERVICE mode state" is limited to below 3% of maximum speed.
However, this speed limitation can be cancelled even in "SERVICE mode state" under the user's
responsibility.
Setting value
0
1
Details
The robot movement speed is limited to 3% or less of maximum speed in
SERVICE mode state.
The robot movement speed is not limited even in SERVICE mode state.