Siemens Simotion A4027118-A0414 User Manual
Page 70
Section C: Integrating the core “flying saw” functions
Program environment and interfaces
Flying Saw with SIMOTION
A4027118-A0414
V 1.4
Release 06/06/08
70/107
C
opyr
ight
©
Si
em
ens
AG 2
0
08
Al
l r
ights r
e
s
e
rv
ed
M
anual_
S
IM
OTION Fl
ying Saw
_
V1
.4.
d
oc
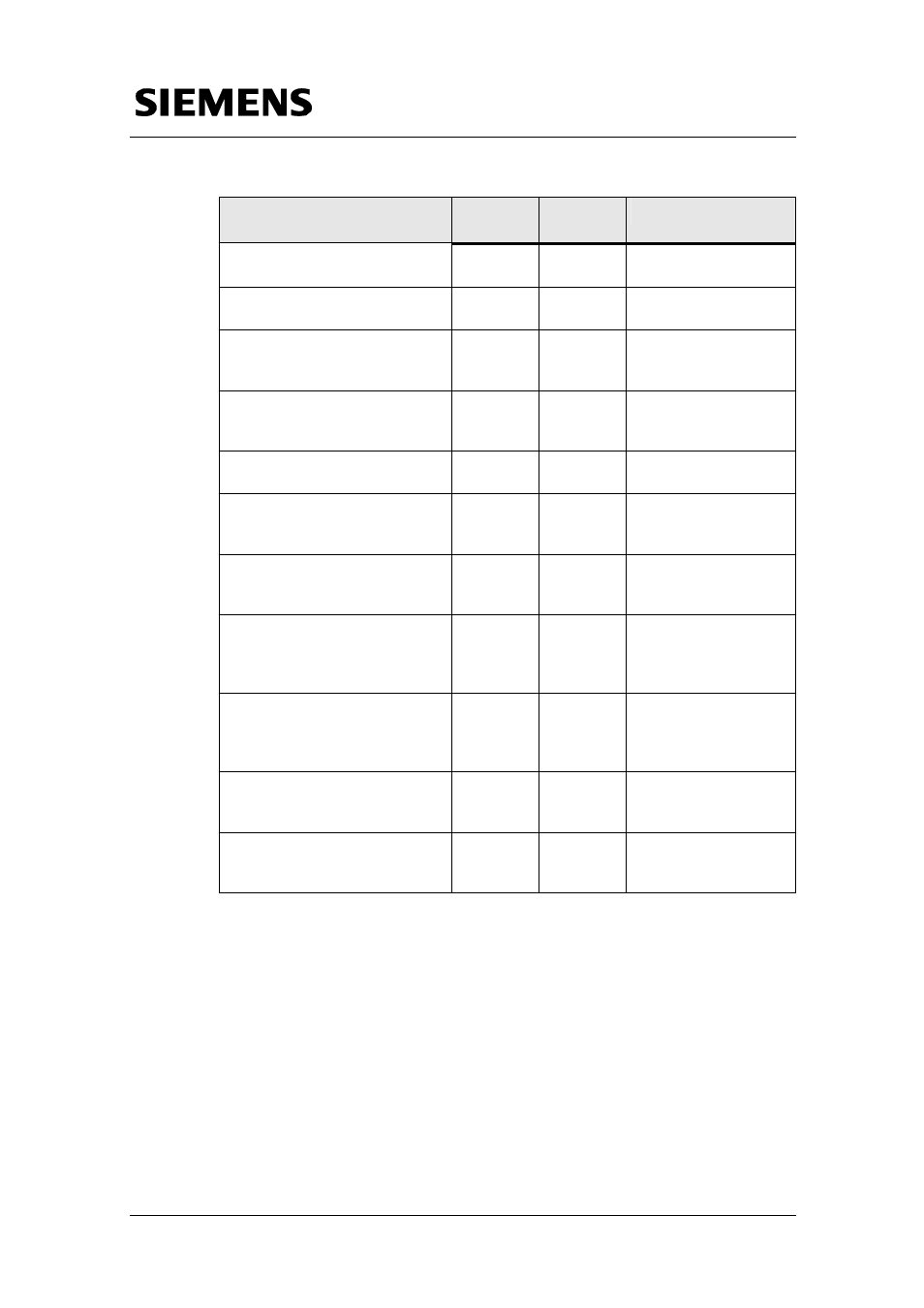
Parameter
Data type
Initial
value
Description
EndSyncPos [mm]
LREAL
20.0
End position of the
synchronous range
EndPos [mm]
LREAL
125.0
Starting position of the
cross-cutter
ToStartposVelocity [mm/s]
LREAL
100.0
Velocity of the travel
back to the starting
position
ToBackposVelocity [mm/s]
LREAL
150.0
Velocity of the travel
back to the starting
position
AccelerationCut [mm/s²]
LREAL
100.0
Acceleration value for
synchronization motion
AccelerationBack [mm/s²]
LREAL
100.0
Acceleration value for
return motion to the
starting position
AccelerationGap [mm/s²]
LREAL
100.0
Acceleration value for
motion to create a
"gap".
GearingRatio LREAL
1.0
Ratio between
measured and
effective velocity of the
material web.
CutEverySensorSignal DINT
1 Specifies after how
many sensor signals a
synchronous position
is to be generated.
GapLength LREAL
10.0
Length of the gap that
should be located
between the cut pieces
GapVelocity LREAL
50.0
Higher-level velocity
with which the gap is
to be created