2 call environment, 3 interfaces, Simotion – Siemens Simotion A4027118-A0414 User Manual
Page 65
Section C: Integrating the core “flying saw” functions
Program environment and interfaces
Flying Saw with SIMOTION
A4027118-A0414
V 1.4
Release 06/06/08
65/107
C
opyr
ight
©
Si
em
ens
AG 2
0
08
Al
l r
ights r
e
s
e
rv
ed
M
anual_
S
IM
OTION Fl
ying Saw
_
V1
.4.
d
oc
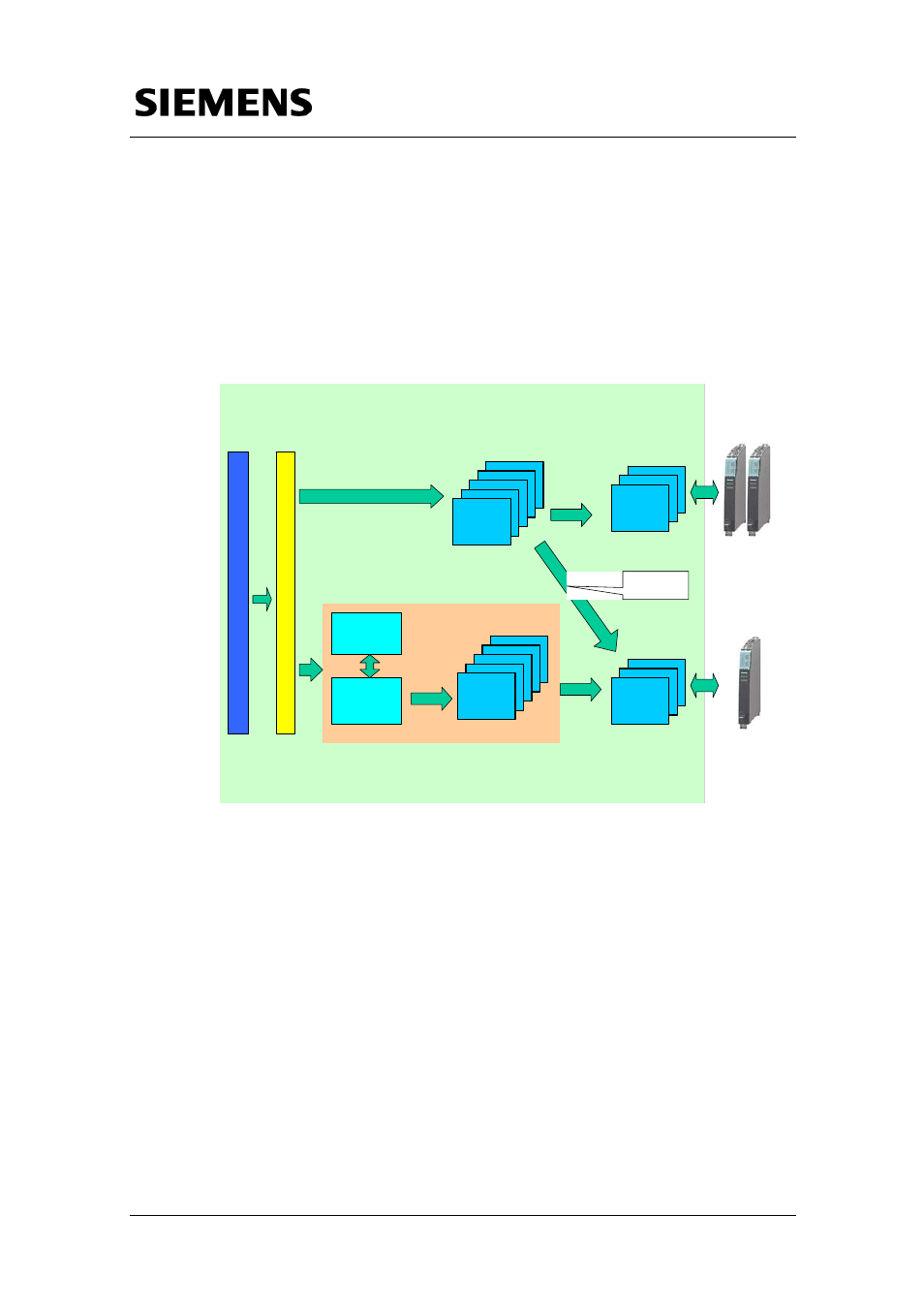
6.2 Call
environment
The function block FB_BGD_TEMPLATE_FlyingSaw() of the “flying saw”
core function must be cyclically called in the user program. This is the
reason that the call can only be made from a program that is incorporated
in the background task.
Fig. 6-1 Call environment of the FB_BGD_TEMPLATE_FlyingSaw()
SIMOTION
„FB_BGD_
TEMPLATE_
FlyingSaw()“
TO
B
a
c
k
g
r
o
u
n
d
T
a
s
k
TO specific
commands
TO specific
commands
TO
in mode (4)
Manual only
Flying Saw Axis
other Axes
Central Function Flying Saw
U
s
e
r
s
P
r
o
g
r
a
m
Unit „FS_Var“
The technology object “FlyingSawAxis”, influenced by the function block
FB_BGD_TEMPLATE_FlyingSaw(), may only be addressed by the user
program if, beforehand, the user switched the core “flying saw” function into
Mode 4 “Manual”
. In all of the other modes, it is not permissible that the
user program influences the technology object “FlyingSawAxis”.
6.3 Interfaces
6.3.1
Classifying the interfaces
The function block FB_BGD_TEMPLATE_FlyingSaw() can be influenced
using several parameters and interfaces that are classified/sub-divided into
the following areas: