Communication functions – MITSUBISHI ELECTRIC MR-J2S- A User Manual
Page 306
14 - 13
14. COMMUNICATION FUNCTIONS
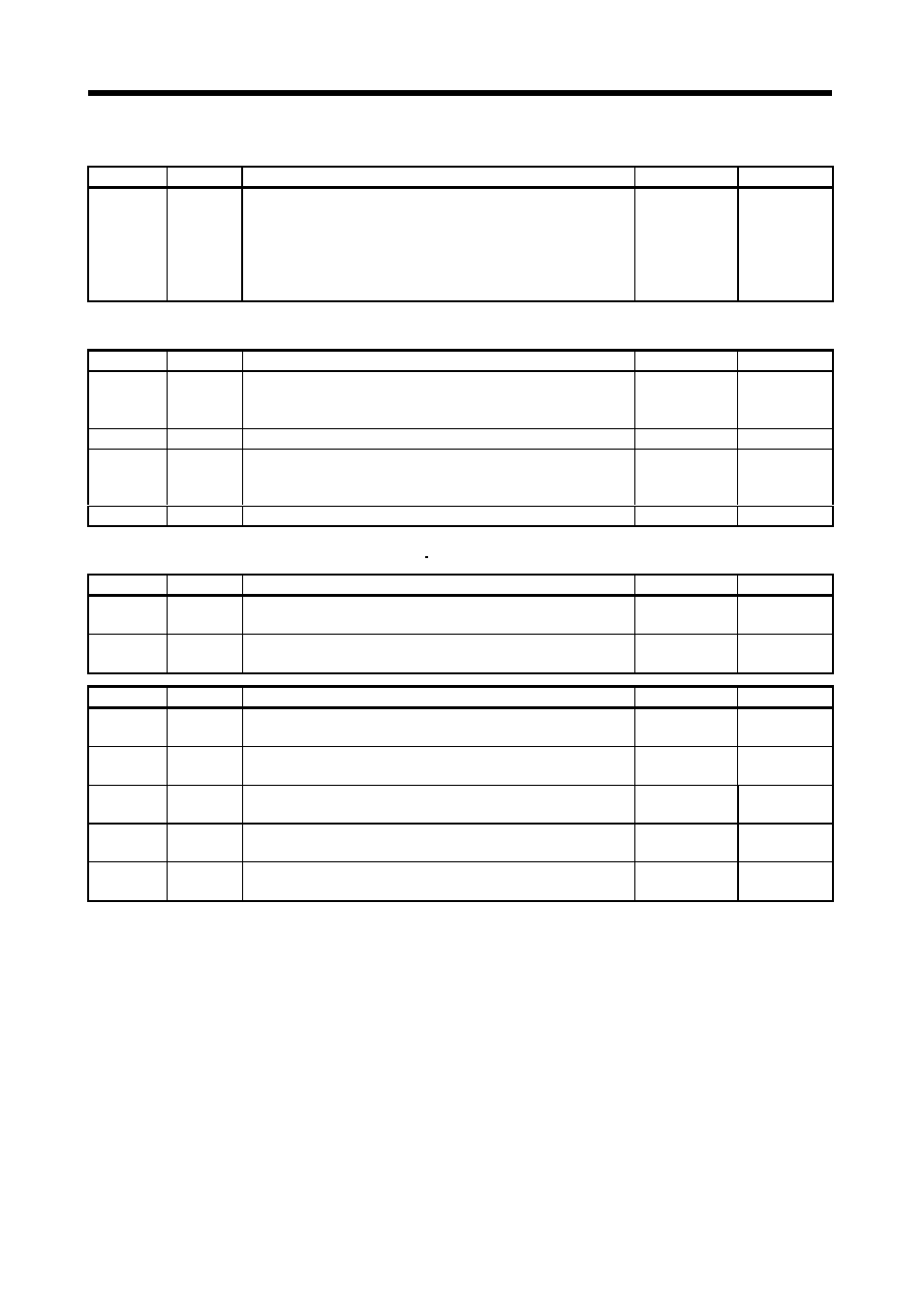
(5) Operation mode selection (Command [8][B])
Command
Data No.
Description
Setting range
Frame length
[8][B]
[0][0]
Operation mode changing
0000: Exit from test operation mode
0001: Jog operation
0002: Positioning operation
0003: Motor-less operation
0004: Output signal (DO) forced output
0000 to 0004
4
(6) External input signal disable (Command [9][0])
Command
Data No.
Description
Setting range
Frame length
[9][0]
[0][0]
Turns off the external input signals (DI), external analog input
signals and pulse train inputs with the exception of EMG, LSP
and LSN, independently of the external ON/OFF statuses.
1EA5
4
[9][0]
[0][3]
Disables all output devices (DO).
1EA5
4
[9][0]
[1][0]
Enables the disabled external input signals (DI), external analog
input signals and pulse train inputs with the exception of EMG,
LSP and LSN.
1EA5
4
[9][0]
[1][3]
Enables the disabled external output signals (DO).
1EA5
4
(7) Data for test operation mode (Command [9][2] [A][0])
Command
Data No.
Description
Setting range
Frame length
[9][2]
[0][0]
Input signal for test operation
Refer to section
14.12.6
8
[9][2]
[A][0]
Forced output from signal pin
Refer to section
14.12.8
8
Command
Data No.
Description
Setting range
Frame length
[A][0]
[1][0]
Writes the speed of the test operation mode (jog operation,
positioning operation).
0000 to 7FFF
4
[A][0]
[1][1]
Writes the acceleration/deceleration time constant of the test
operation mode (jog operation, positioning operation).
00000000 to
7FFFFFFF
8
[A][0]
[1][2]
Clears the acceleration/deceleration time constant of the test
operation mode (jog operation, positioning operation).
1EA5
4
[A][0]
[1][3]
Writes the moving distance (in pulses) of the test operation mode
(jog operation, positioning operation).
80000000 to
7FFFFFFF
8
[A][0]
[1][5]
Temporary stop command of the test operation mode (jog
operation, positioning operation)
1EA5
4