5 position smoothing, Parameters – MITSUBISHI ELECTRIC MR-J2S- A User Manual
Page 157
5 - 34
5. PARAMETERS
5.2.5 Position smoothing
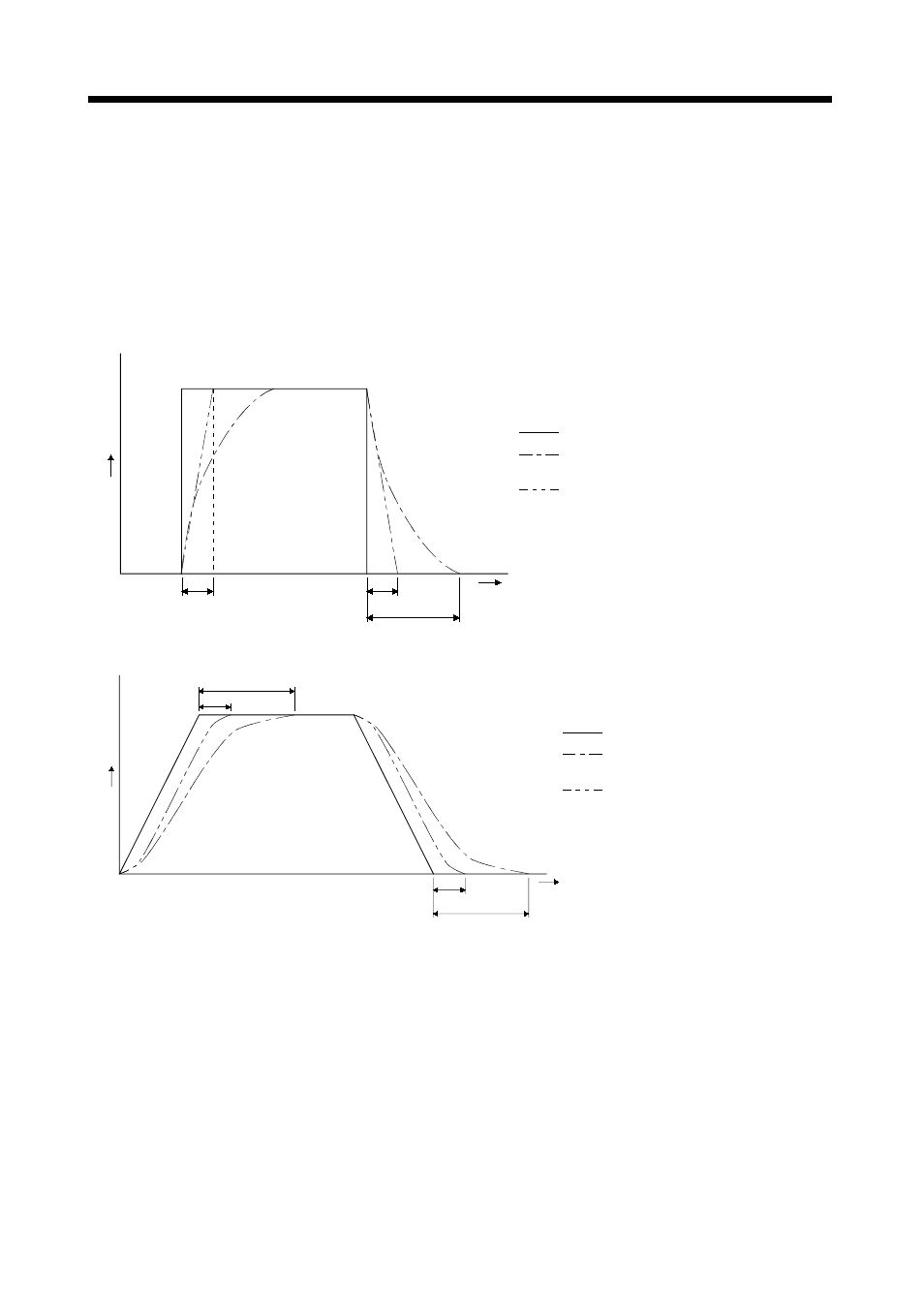
By setting the position command acceleration/deceleration time constant (parameter No.7), you can run
the servo motor smoothly in response to a sudden position command.
The following diagrams show the operation patterns of the servo motor in response to a position command
when you have set the position command acceleration/deceleration time constant.
Choose the primary delay or linear acceleration/deceleration in parameter No. 55 according to the
machine used.
(1) For step input
Co
m
m
and
(3t)
t
t
Time
t
: Input position command
: Position command after
filtering for primary delay
: Position command after filtering
for linear acceleration/deceleration
: Position command acceleration/
deceleration time constant (parameter No. 7)
(2) For trapezoidal input
C
omma
nd
Time
t
(3t)
t
(3t)
t
: Input position command
: Position command after
filtering for primary delay
: Position command after filtering
for linear acceleration/deceleration
: Position command acceleration/
deceleration time constant
(parameter No. 7)