4 xslv connector, 5 robot specifications – Adept s800 s800 User Manual
Page 113
Chapter 7: Technical Specifications
XSYS
Pin #
XSYSTEM
Pin #
Description
Comment
Pin Location
8
N/C
9
16
ESTOP_SRC
E-Stop System +24 V
Shell
Shell
SHIELD
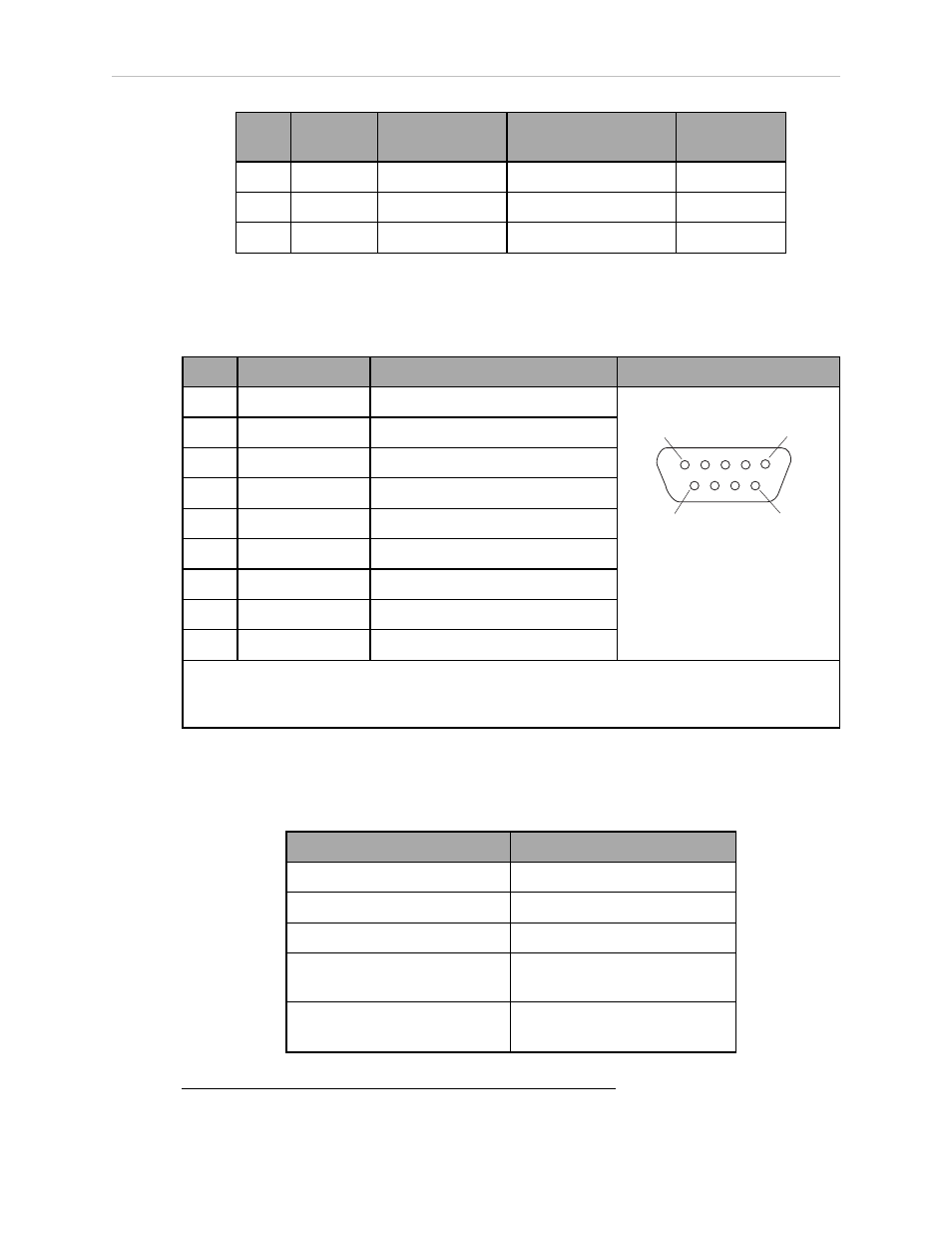
7.4 XSLV Connector
Table 7-2. XSLV Connector Pinout (AIB Only)
Pin # Description
Comment
Pin Location
1
ESTOPGND
ESTOP System Ground
Pin 1
Pin 5
Pin 6
Pin 9
XSLV1/2 Connector
as viewed on Cobra
2
MAN1
ESTOP Manual Input Ch 1
3
MAN2
ESTOP Manual Input Ch 2
4
HIPWRDIS
High Power Disable
5
ESTOP_RESET
Normally Closed Check Contacts
6
AUTO1
ESTOP Auto Input Ch 1
7
AUTO2
ESTOP Auto Input Ch 2
8
N/C
9
ESTOP_SRC
ESTOP System +24 V
Mating Connector:
AMP/Tyco #747904-2, 9-pin D-Sub
AMP/Tyco #748676-1, D-Sub Cable Clamp
7.5 Robot Specifications
Table 7-3. Robot Specifications
a
Description
s800 Inverted Robot
Reach
800 mm (31.5 in)
Payload - rated
2.0 kg (4.4 lb)
Payload - maximum
5.5 kg (12.1 lb)
Moment of Inertia
Joint 4 - 450 kg-cm²
(150 lb-in²) - max
Downward Push Force - Burst
(no load)
298 N (67 lb) - maximum
a
Specifications subject to change without notice.
Adept Cobra s800 Inverted Robot User's Guide, Rev H1
Page 113 of 142