I.8 parameter table – Yaskawa U1000 Industrial MATRIX Drive User Manual
Page 79
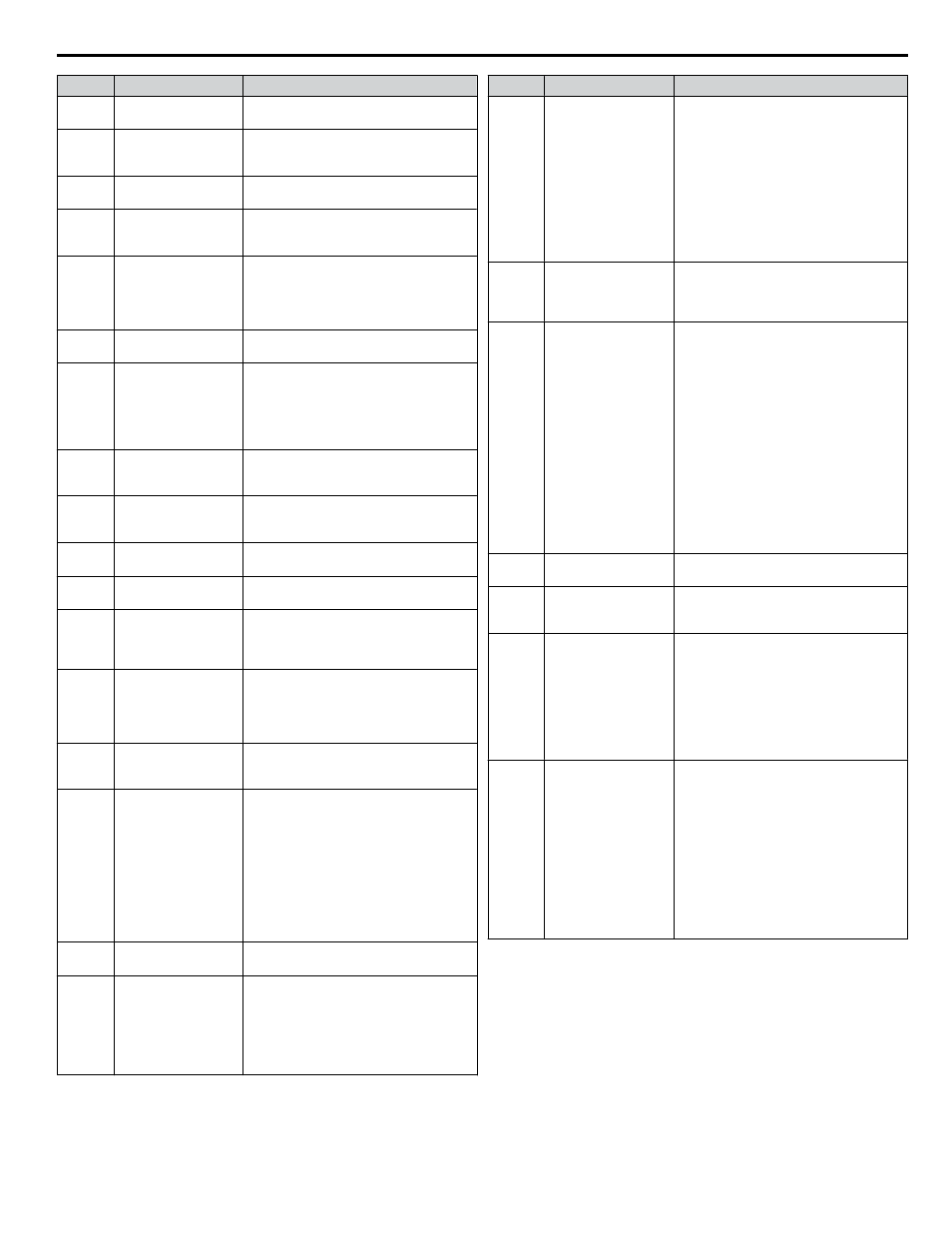
No.
Name
Description
H5-06
Drive Transmit Wait
Time
Set the wait time between receiving and
sending data.
H5-07
RTS Control Selection
0: Disabled. RTS is always on.
1: Enabled. RTS turns on only when
sending.
H5-09
Communication Fault
Detection Time
Sets the time required to detect a
communications error.
H5-10
Unit Selection for
MEMOBUS/Modbus
Register 0025H
0: 0.1 V units
1: 1 V units
H5-11
Communications
ENTER Function
Selection
0: Drive requires an Enter command
before accepting any changes to
parameter settings.
1: Parameter changes are activated
immediately without the Enter command.
H5-12
Run Command
Method Selection
0: FWD/Stop, REV/Stop
1: Run/Stop, FWD/REV
H6-01
Pulse Train Input
Terminal RP Function
Selection
0: Frequency reference
1: PID feedback value
2: PID setpoint value
3: V/f Control with Simple PG feedback
(possible only when using motor 1 in V/f
Control)
H6-02
Pulse Train Input
Scaling
Sets the terminal RP input signal frequency
that is equal to 100% of the value selected
in H6-01.
H6-03
Pulse Train Input Gain
Sets the level of the value selected in H6-01
when a frequency with the value set in
H6-02 is input.
H6-04
Pulse Train Input Bias Sets the level of the value selected in H6-01
when 0 Hz is input.
H6-05
Pulse Train Input Filter
Time
Sets the pulse train input filter time
constant.
H6-06
Pulse Train Monitor
Selection
Select the pulse train monitor output
function (value of the o-oo part of
Uo-oo).
For example, enter “501” for U5-01.
H6-07
Pulse Train Monitor
Scaling
Sets the terminal MP output signal
frequency when the monitor value is 100%.
For example, to have the pulse train monitor
output equal the output frequency, set
H6-06 to 102 and H6-07 to 0.
H6-08
Pulse Train Input
Minimum Frequency
Sets the minimum frequency for the pulse
train input to be detected. Enabled when
H6-01 = 0, 1, or 2.
L1-01
Motor Overload
Protection Selection
0: Disabled
1: General purpose motor (standard fan
cooled)
2: Drive dedicated motor with a speed range
of 1:10
3: Vector motor with a speed range of 1:100
4: PM motor with variable torque
5: PM motor with constant torque control
6: General purpose motor (50 Hz)
Default setting is determined by parameter
A1-02, Control Method Selection.
L1-02
Motor Overload
Protection Time
Sets the motor thermal overload protection
(oL1) time.
L2-01
Momentary Power
Loss Operation
Selection
0: Disabled. Drive trips on Uv1 fault
when power is lost.
1: Recover within the time set in L2-02. Uv1
will be detected if power loss is longer than
L2-02.
2: Recover as long as CPU has power. Uv1
is not detected.
No.
Name
Description
L3-04
Stall Prevention
Selection during
Deceleration
0: Disabled. Deceleration at the active
deceleration rate. An ov fault may occur.
1: General purpose. Deceleration is
paused when the DC bus voltage exceeds
the Stall Prevention level.
4: Overexcitation Deceleration.
Decelerates while increasing the motor
flux.
6: Enable (Current Limit). The deceleration
rate is automatically adjusted while limiting
the regeneration current at the setting value
of the stall prevention level (L3-14).
L5-01
Number of Auto
Restart Attempts
Sets the number of times the drive may
attempt to restart after the following faults
occur: GF, LF, oC, oH1, oL1, oL3, oL4, ov,
Sto, Uv1.
L6-01
Torque Detection
Selection 1
0: Disabled
1: oL3 detection only active during speed
agree, operation continues after detection
2: oL3 detection always active during run,
operation continues after detection
3: oL3 detection only active during speed
agree, output shuts down on an oL3 fault
4: oL3 detection always active during run,
output shuts down on an oL3 fault
5: UL3 detection only active during speed
agree, operation continues after detection
6: UL3 detection always active during run,
operation continues after detection
7: UL3 detection only active during speed
agree, output shuts down on a UL3 fault
8: UL3 detection always active during run,
output shuts down on a UL3 fault
L6-02
Torque Detection
Level 1
Sets the overtorque and undertorque
detection level.
L6-03
Torque Detection Time
1
Sets the time an overtorque or undertorque
condition must exist to trigger torque
detection 1.
o1-03
Digital Operator
Display Selection
0: 0.01 Hz
1: 0.01% (100% = E1-04)
2: r/min (calculated using the number of
motor poles setting in E2-04, E4-04, or
E5-04)
3: User-selected units (set by o1-10 and
o1-11)
Default setting is determined by parameter
A1-02, Control Method Selection.
T1-01
Auto-Tuning Mode
Selection
0: Rotational Auto-Tuning
2: Stationary Auto-Tuning for Line-to-Line
Resistance
3: Rotational Auto-Tuning for V/f Control
(necessary for Energy Savings and Speed
Estimation Speed Search)
4: Stationary Auto-Tuning 2
5: Stationary Auto-Tuning 3
8: Inertia Tuning (perform Rotational Auto-
Tuning prior to Inertia Tuning)
9: ASR Gain Tuning (perform Rotational
Auto-Tuning prior to ASR Gain Auto-
Tuning)
<1> Available in drive software versions PRG: 1015 and later.
i.8 Parameter Table
YASKAWA ELECTRIC TOEP C710636 04C U1000 Industrial MATRIX Drive Quick Start Guide
79